|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
MAVLab Delft University of Technology This control algorithm is Incremental Nonlinear Dynamic Inversion (INDI) More...
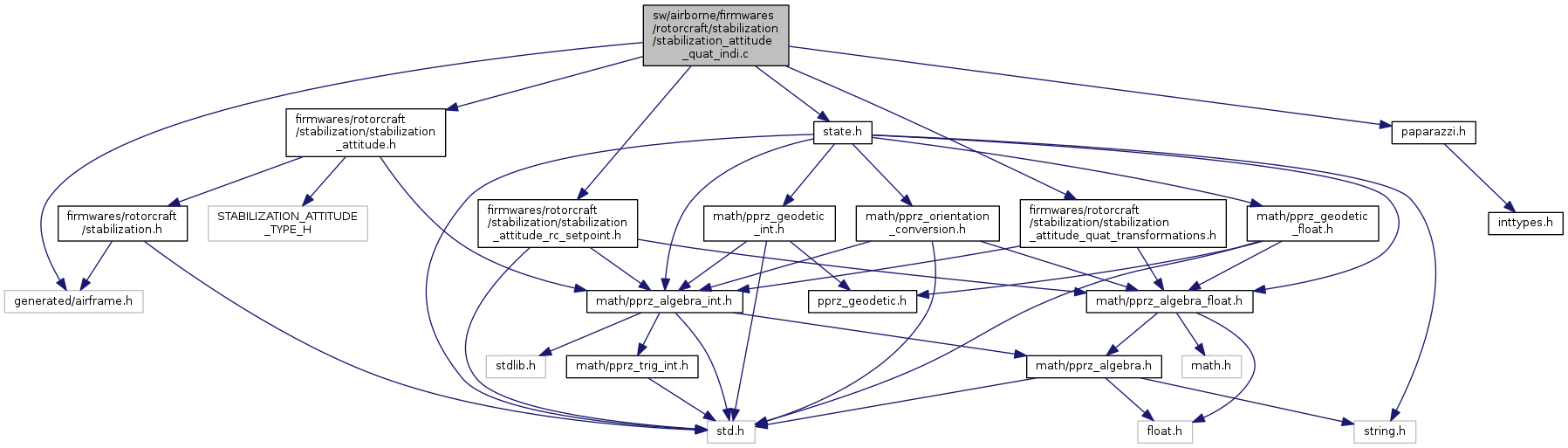
#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_rc_setpoint.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_quat_transformations.h"#include "state.h"#include "generated/airframe.h"#include "paparazzi.h" Include dependency graph for stabilization_attitude_quat_indi.c:
Include dependency graph for stabilization_attitude_quat_indi.c:Go to the source code of this file.
Macros | |
| #define | INDI_EST_SCALE 0.001 |
| #define | STABILIZATION_INDI_FILT_OMEGA 50.0 |
| #define | STABILIZATION_INDI_FILT_ZETA 0.55 |
| #define | STABILIZATION_INDI_FILT_OMEGA2 (STABILIZATION_INDI_FILT_OMEGA*STABILIZATION_INDI_FILT_OMEGA) |
| #define | STABILIZATION_INDI_FILT_OMEGA_R STABILIZATION_INDI_FILT_OMEGA |
| #define | STABILIZATION_INDI_FILT_ZETA_R STABILIZATION_INDI_FILT_ZETA |
| #define | STABILIZATION_INDI_FILT_OMEGA2_R (STABILIZATION_INDI_FILT_OMEGA_R*STABILIZATION_INDI_FILT_OMEGA_R) |
Functions | |
| void | stabilization_attitude_init (void) |
| void | stabilization_attitude_enter (void) |
| void | stabilization_attitude_set_failsafe_setpoint (void) |
| void | stabilization_attitude_set_rpy_setpoint_i (struct Int32Eulers *rpy) |
| void | stabilization_attitude_set_earth_cmd_i (struct Int32Vect2 *cmd, int32_t heading) |
| static void | attitude_run_indi (int32_t indi_commands[], struct Int32Quat *att_err, bool_t in_flight) |
| void | stabilization_attitude_run (bool_t enable_integrator) |
| void | stabilization_attitude_read_rc (bool_t in_flight, bool_t in_carefree, bool_t coordinated_turn) |
| void | stabilization_indi_second_order_filter (struct FloatRates *input, struct FloatRates *filter_ddx, struct FloatRates *filter_dx, struct FloatRates *filter_x, float omega, float zeta, float omega_r) |
| void | lms_estimation (void) |
Variables | |
| int32_t | stabilization_att_indi_cmd [COMMANDS_NB] |
| struct FloatRates | g1 = {STABILIZATION_INDI_G1_P, STABILIZATION_INDI_G1_Q, STABILIZATION_INDI_G1_R} |
| float | g2 = STABILIZATION_INDI_G2_R |
| struct ReferenceSystem | reference_acceleration |
| struct IndiVariables | indi |
| struct Int32Eulers | stab_att_sp_euler |
| with INT32_ANGLE_FRAC More... | |
| struct Int32Quat | stab_att_sp_quat |
| with INT32_QUAT_FRAC More... | |
| struct FloatRates | filtered_rate_estimation = {0., 0., 0.} |
| struct FloatRates | filtered_rate_deriv_estimation = {0., 0., 0.} |
| struct FloatRates | filtered_rate_2deriv_estimation = {0., 0., 0.} |
| struct FloatRates | indi_u_estimation = {0., 0., 0.} |
| struct FloatRates | udot_estimation = {0., 0., 0.} |
| struct FloatRates | udotdot_estimation = {0., 0., 0.} |
| struct FloatRates | g_est = {STABILIZATION_INDI_G1_P / INDI_EST_SCALE, STABILIZATION_INDI_G1_Q / INDI_EST_SCALE, STABILIZATION_INDI_G1_R / INDI_EST_SCALE} |
| float | g2_est = STABILIZATION_INDI_G2_R / INDI_EST_SCALE |
| float | mu = STABILIZATION_INDI_ADAPTIVE_MU |
| bool_t | use_adaptive_indi = FALSE |
MAVLab Delft University of Technology This control algorithm is Incremental Nonlinear Dynamic Inversion (INDI)
This is a simplified implementation of the (soon to be) publication in the journal of Control Guidance and Dynamics: Adaptive Incremental Nonlinear Dynamic Inversion for Attitude Control of Micro Aerial Vehicles
Definition in file stabilization_attitude_quat_indi.c.
| #define INDI_EST_SCALE 0.001 |
Definition at line 79 of file stabilization_attitude_quat_indi.c.
Referenced by lms_estimation().
| #define STABILIZATION_INDI_FILT_OMEGA 50.0 |
Definition at line 92 of file stabilization_attitude_quat_indi.c.
Referenced by attitude_run_indi(), and stabilization_attitude_run().
| #define STABILIZATION_INDI_FILT_OMEGA2 (STABILIZATION_INDI_FILT_OMEGA*STABILIZATION_INDI_FILT_OMEGA) |
Definition at line 99 of file stabilization_attitude_quat_indi.c.
| #define STABILIZATION_INDI_FILT_OMEGA2_R (STABILIZATION_INDI_FILT_OMEGA_R*STABILIZATION_INDI_FILT_OMEGA_R) |
Definition at line 106 of file stabilization_attitude_quat_indi.c.
| #define STABILIZATION_INDI_FILT_OMEGA_R STABILIZATION_INDI_FILT_OMEGA |
Definition at line 102 of file stabilization_attitude_quat_indi.c.
Referenced by attitude_run_indi(), and stabilization_attitude_run().
| #define STABILIZATION_INDI_FILT_ZETA 0.55 |
Definition at line 96 of file stabilization_attitude_quat_indi.c.
Referenced by attitude_run_indi(), and stabilization_attitude_run().
| #define STABILIZATION_INDI_FILT_ZETA_R STABILIZATION_INDI_FILT_ZETA |
Definition at line 103 of file stabilization_attitude_quat_indi.c.
|
static |
Definition at line 194 of file stabilization_attitude_quat_indi.c.
References IndiVariables::angular_accel_ref, IndiVariables::du, ReferenceSystem::err_p, ReferenceSystem::err_q, ReferenceSystem::err_r, IndiVariables::filtered_rate, IndiVariables::filtered_rate_deriv, FLOAT_RATES_ZERO, g2, lms_estimation(), FloatRates::p, FloatRates::q, QUAT1_FLOAT_OF_BFP, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, FloatRates::r, ReferenceSystem::rate_p, ReferenceSystem::rate_q, ReferenceSystem::rate_r, stabilization_cmd, STABILIZATION_INDI_FILT_OMEGA, STABILIZATION_INDI_FILT_OMEGA_R, STABILIZATION_INDI_FILT_ZETA, stabilization_indi_second_order_filter(), stateGetBodyRates_f(), IndiVariables::u, IndiVariables::u_act_dyn, IndiVariables::u_in, IndiVariables::udot, and IndiVariables::udotdot.
Referenced by stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:| void lms_estimation | ( | void | ) |
Definition at line 324 of file stabilization_attitude_quat_indi.c.
References g2, g2_est, INDI_EST_SCALE, mu, FloatRates::p, PERIODIC_FREQUENCY, FloatRates::q, FloatRates::r, stabilization_indi_second_order_filter(), stateGetBodyRates_f(), IndiVariables::u_act_dyn, and use_adaptive_indi.
Referenced by attitude_run_indi().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_enter | ( | void | ) |
Definition at line 140 of file stabilization_attitude_quat_indi.c.
References IndiVariables::angular_accel_ref, IndiVariables::du, IndiVariables::filtered_rate, IndiVariables::filtered_rate_2deriv, IndiVariables::filtered_rate_deriv, FLOAT_RATES_ZERO, Int32Eulers::psi, stab_att_sp_euler, stabilization_attitude_get_heading_i(), IndiVariables::u, IndiVariables::u_act_dyn, IndiVariables::u_in, IndiVariables::udot, and IndiVariables::udotdot.
Here is the call graph for this function:| void stabilization_attitude_init | ( | void | ) |
Definition at line 132 of file stabilization_attitude_quat_indi.c.
References DefaultPeriodic, and register_periodic_telemetry().
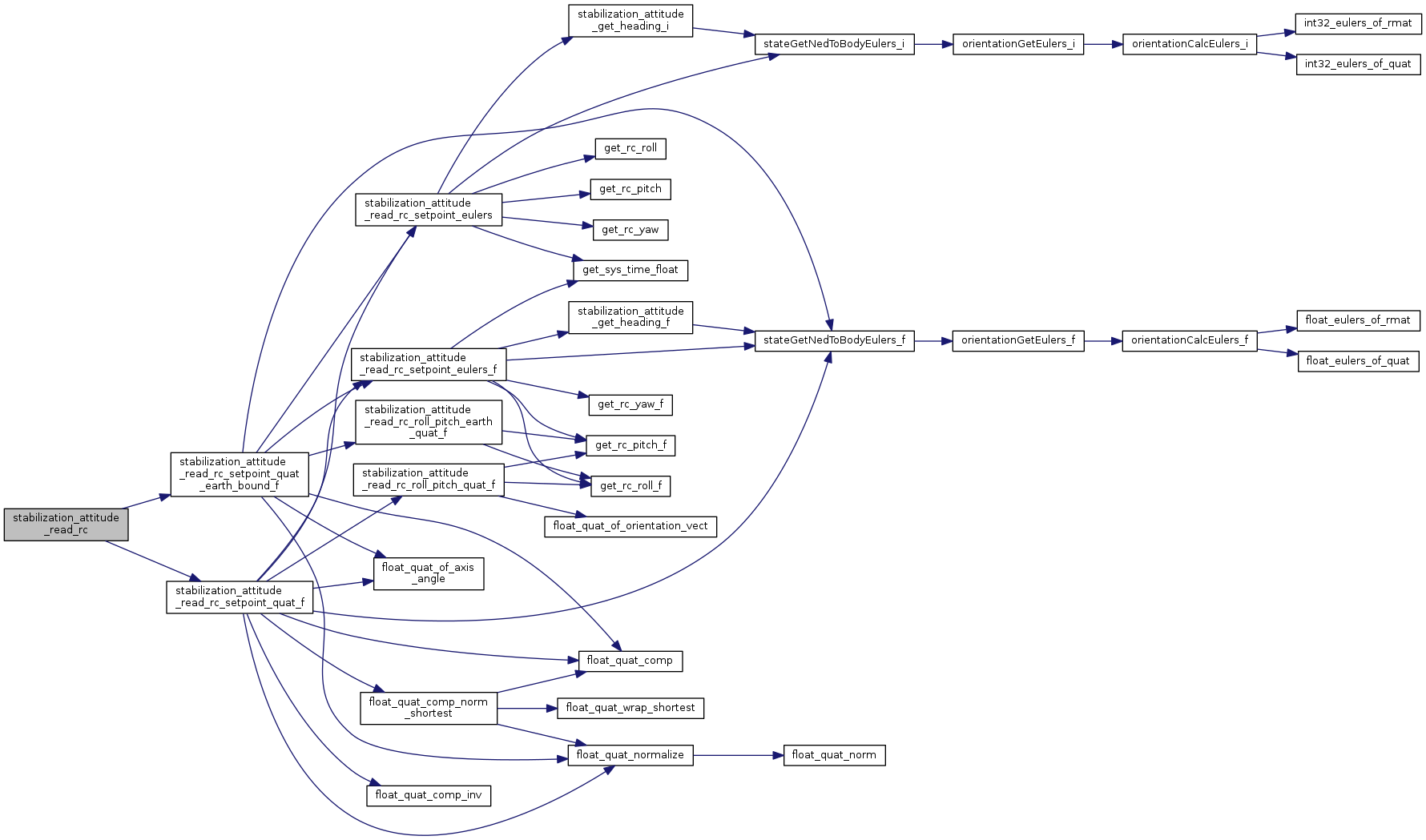
Here is the call graph for this function:| void stabilization_attitude_read_rc | ( | bool_t | in_flight, |
| bool_t | in_carefree, | ||
| bool_t | coordinated_turn | ||
| ) |
Definition at line 297 of file stabilization_attitude_quat_indi.c.
References QUAT_BFP_OF_REAL, stab_att_sp_quat, stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), and stabilization_attitude_read_rc_setpoint_quat_f().
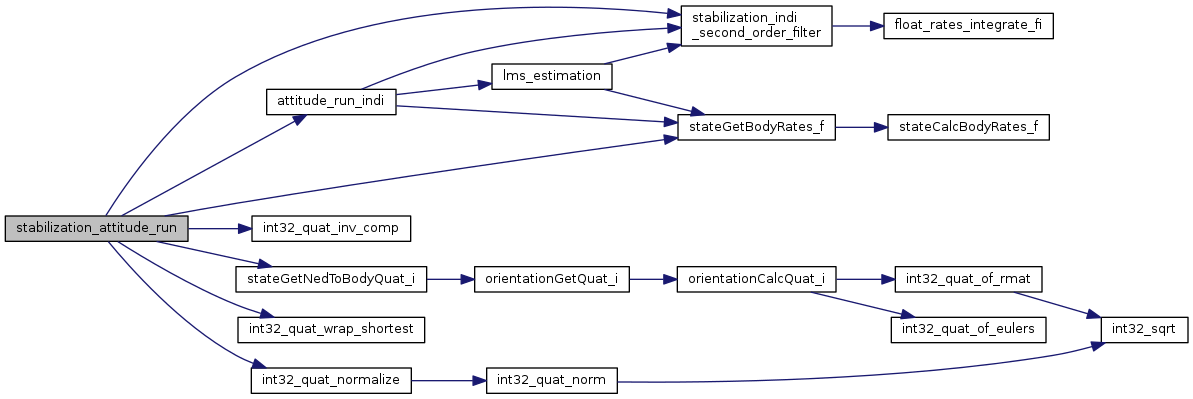
Here is the call graph for this function:| void stabilization_attitude_run | ( | bool_t | enable_integrator | ) |
Definition at line 266 of file stabilization_attitude_quat_indi.c.
References attitude_run_indi(), IndiVariables::filtered_rate, IndiVariables::filtered_rate_2deriv, IndiVariables::filtered_rate_deriv, int32_quat_inv_comp(), int32_quat_normalize(), int32_quat_wrap_shortest(), MAX_PPRZ, stab_att_sp_quat, stabilization_att_indi_cmd, stabilization_cmd, STABILIZATION_INDI_FILT_OMEGA, STABILIZATION_INDI_FILT_OMEGA_R, STABILIZATION_INDI_FILT_ZETA, stabilization_indi_second_order_filter(), stateGetBodyRates_f(), and stateGetNedToBodyQuat_i().
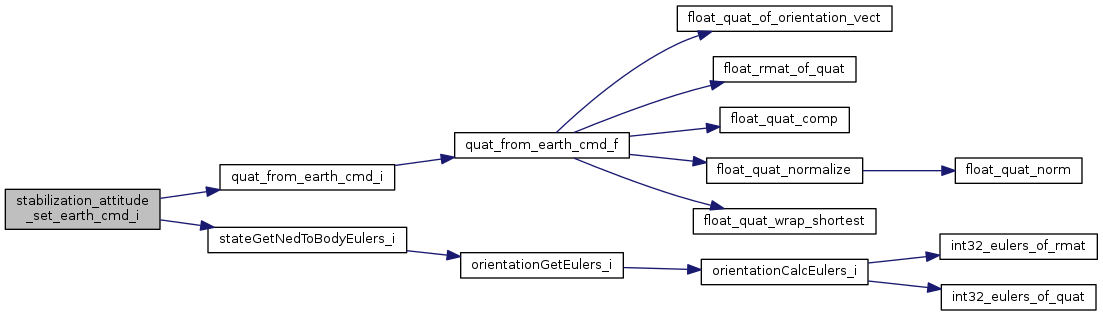
Here is the call graph for this function:| void stabilization_attitude_set_earth_cmd_i | ( | struct Int32Vect2 * | cmd, |
| int32_t | heading | ||
| ) |
Definition at line 177 of file stabilization_attitude_quat_indi.c.
References heading, INT32_TRIG_FRAC, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, quat_from_earth_cmd_i(), stab_att_sp_euler, stab_att_sp_quat, stateGetNedToBodyEulers_i(), Int32Eulers::theta, Int32Vect2::x, and Int32Vect2::y.
Here is the call graph for this function:| void stabilization_attitude_set_failsafe_setpoint | ( | void | ) |
Definition at line 159 of file stabilization_attitude_quat_indi.c.
References PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, stab_att_sp_quat, and stabilization_attitude_get_heading_i().
Here is the call graph for this function:| void stabilization_attitude_set_rpy_setpoint_i | ( | struct Int32Eulers * | rpy | ) |
Definition at line 169 of file stabilization_attitude_quat_indi.c.
References int32_quat_of_eulers(), stab_att_sp_euler, and stab_att_sp_quat.
Here is the call graph for this function:| void stabilization_indi_second_order_filter | ( | struct FloatRates * | input, |
| struct FloatRates * | filter_ddx, | ||
| struct FloatRates * | filter_dx, | ||
| struct FloatRates * | filter_x, | ||
| float | omega, | ||
| float | zeta, | ||
| float | omega_r | ||
| ) |
Definition at line 309 of file stabilization_attitude_quat_indi.c.
References float_rates_integrate_fi(), omega_r, FloatRates::p, PERIODIC_FREQUENCY, FloatRates::q, and FloatRates::r.
Referenced by attitude_run_indi(), lms_estimation(), and stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:| struct FloatRates filtered_rate_2deriv_estimation = {0., 0., 0.} |
Definition at line 75 of file stabilization_attitude_quat_indi.c.
| struct FloatRates filtered_rate_deriv_estimation = {0., 0., 0.} |
Definition at line 74 of file stabilization_attitude_quat_indi.c.
| struct FloatRates filtered_rate_estimation = {0., 0., 0.} |
Definition at line 73 of file stabilization_attitude_quat_indi.c.
| struct FloatRates g1 = {STABILIZATION_INDI_G1_P, STABILIZATION_INDI_G1_Q, STABILIZATION_INDI_G1_R} |
Definition at line 46 of file stabilization_attitude_quat_indi.c.
Referenced by gain_scheduling_periodic().
| float g2 = STABILIZATION_INDI_G2_R |
Definition at line 47 of file stabilization_attitude_quat_indi.c.
Referenced by attitude_run_indi(), gain_scheduling_periodic(), and lms_estimation().
| float g2_est = STABILIZATION_INDI_G2_R / INDI_EST_SCALE |
Definition at line 81 of file stabilization_attitude_quat_indi.c.
Referenced by lms_estimation().
| struct FloatRates g_est = {STABILIZATION_INDI_G1_P / INDI_EST_SCALE, STABILIZATION_INDI_G1_Q / INDI_EST_SCALE, STABILIZATION_INDI_G1_R / INDI_EST_SCALE} |
Definition at line 80 of file stabilization_attitude_quat_indi.c.
| struct IndiVariables indi |
Definition at line 56 of file stabilization_attitude_quat_indi.c.
| struct FloatRates indi_u_estimation = {0., 0., 0.} |
Definition at line 76 of file stabilization_attitude_quat_indi.c.
| float mu = STABILIZATION_INDI_ADAPTIVE_MU |
Definition at line 82 of file stabilization_attitude_quat_indi.c.
Referenced by lms_estimation().
| struct ReferenceSystem reference_acceleration |
Definition at line 48 of file stabilization_attitude_quat_indi.c.
| struct Int32Eulers stab_att_sp_euler |
with INT32_ANGLE_FRAC
Definition at line 69 of file stabilization_attitude_quat_indi.c.
Referenced by stabilization_attitude_enter(), stabilization_attitude_set_earth_cmd_i(), and stabilization_attitude_set_rpy_setpoint_i().
| struct Int32Quat stab_att_sp_quat |
with INT32_QUAT_FRAC
Definition at line 70 of file stabilization_attitude_quat_indi.c.
Referenced by stabilization_attitude_read_rc(), stabilization_attitude_run(), stabilization_attitude_set_earth_cmd_i(), stabilization_attitude_set_failsafe_setpoint(), and stabilization_attitude_set_rpy_setpoint_i().
| int32_t stabilization_att_indi_cmd[COMMANDS_NB] |
Definition at line 44 of file stabilization_attitude_quat_indi.c.
Referenced by stabilization_attitude_run().
| struct FloatRates udot_estimation = {0., 0., 0.} |
Definition at line 77 of file stabilization_attitude_quat_indi.c.
| struct FloatRates udotdot_estimation = {0., 0., 0.} |
Definition at line 78 of file stabilization_attitude_quat_indi.c.
| bool_t use_adaptive_indi = FALSE |
Definition at line 88 of file stabilization_attitude_quat_indi.c.
Referenced by lms_estimation().
 1.8.8
1.8.8