|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
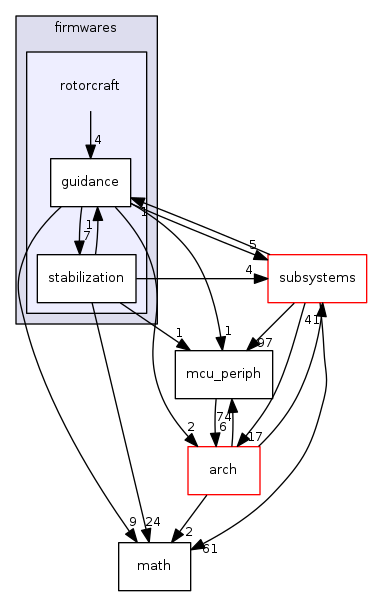
 Directory dependency graph for rotorcraft:
Directory dependency graph for rotorcraft:Directories | |
| directory | guidance |
| directory | stabilization |
Files | |
| file | autopilot.c [code] |
| Autopilot. | |
| file | autopilot.h [code] |
| Autopilot modes. | |
| file | autopilot_arming_switch.h [code] |
| Arm the motors using a switch. | |
| file | autopilot_arming_throttle.h [code] |
| Automatically arm the motors when applying throttle. | |
| file | autopilot_arming_yaw.h [code] |
| Arm the motors by with max yaw stick. | |
| file | autopilot_rc_helpers.h [code] |
| Some helper functions to check RC sticks. | |
| file | datalink.c [code] |
| Handling of messages coming from ground and other A/Cs. | |
| file | guidance.h [code] |
| file | main.c [code] |
| Rotorcraft main loop. | |
| file | main.h [code] |
| Rotorcraft main loop. | |
| file | main_fbw.c [code] |
| Rotorcraft FBW main loop. | |
| file | main_fbw.h [code] |
| Fly By Wire: | |
| file | navigation.c [code] |
| Rotorcraft navigation functions. | |
| file | navigation.h [code] |
| Rotorcraft navigation functions. | |
| file | rotorcraft_telemetry.c [code] |
| file | stabilization.c [code] |
| General stabilization interface for rotorcrafts. | |
| file | stabilization.h [code] |
| General stabilization interface for rotorcrafts. | |
 1.8.8
1.8.8