|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
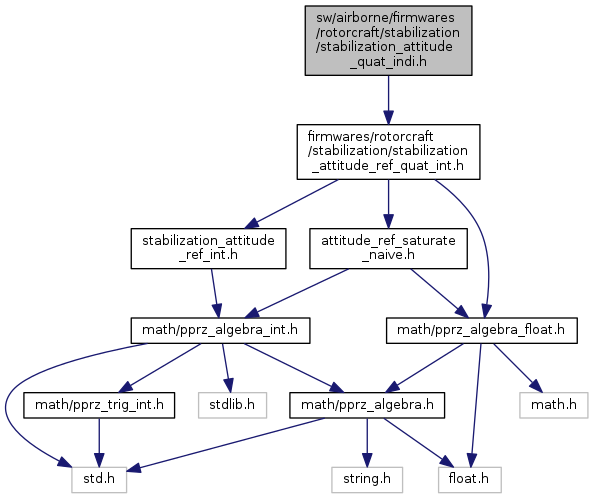
This is the header file of the corresponding c file. More...
 Include dependency graph for stabilization_attitude_quat_indi.h:
Include dependency graph for stabilization_attitude_quat_indi.h:Go to the source code of this file.
Data Structures | |
| struct | ReferenceSystem |
| struct | IndiVariables |
Functions | |
| void | stabilization_indi_second_order_filter (struct FloatRates *input, struct FloatRates *filter_ddx, struct FloatRates *filter_dx, struct FloatRates *filter_x, float omega, float zeta, float omega_r) |
| void | lms_estimation (void) |
Variables | |
| struct FloatRates | g1 |
| float | g2 |
| struct ReferenceSystem | reference_acceleration |
| struct FloatRates | g_est |
| bool_t | use_adaptive_indi |
| struct Int32Eulers | stab_att_sp_euler |
| with INT32_ANGLE_FRAC More... | |
| struct Int32Quat | stab_att_sp_quat |
| with INT32_QUAT_FRAC More... | |
This is the header file of the corresponding c file.
Definition in file stabilization_attitude_quat_indi.h.
| struct ReferenceSystem |
Definition at line 38 of file stabilization_attitude_quat_indi.h.
| Data Fields | ||
|---|---|---|
| float | err_p | |
| float | err_q | |
| float | err_r | |
| float | rate_p | |
| float | rate_q | |
| float | rate_r | |
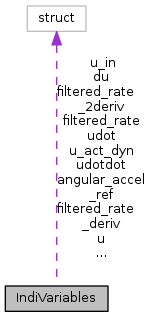
| struct IndiVariables |
Definition at line 47 of file stabilization_attitude_quat_indi.h.
Collaboration diagram for IndiVariables:| Data Fields | ||
|---|---|---|
| struct FloatRates | angular_accel_ref | |
| struct FloatRates | du | |
| struct FloatRates | filtered_rate | |
| struct FloatRates | filtered_rate_2deriv | |
| struct FloatRates | filtered_rate_deriv | |
| struct FloatRates | u | |
| struct FloatRates | u_act_dyn | |
| struct FloatRates | u_in | |
| struct FloatRates | udot | |
| struct FloatRates | udotdot | |
| void lms_estimation | ( | void | ) |
Definition at line 324 of file stabilization_attitude_quat_indi.c.
References g2, g2_est, INDI_EST_SCALE, mu, FloatRates::p, PERIODIC_FREQUENCY, FloatRates::q, FloatRates::r, stabilization_indi_second_order_filter(), stateGetBodyRates_f(), IndiVariables::u_act_dyn, and use_adaptive_indi.
Referenced by attitude_run_indi().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_second_order_filter | ( | struct FloatRates * | input, |
| struct FloatRates * | filter_ddx, | ||
| struct FloatRates * | filter_dx, | ||
| struct FloatRates * | filter_x, | ||
| float | omega, | ||
| float | zeta, | ||
| float | omega_r | ||
| ) |
Definition at line 309 of file stabilization_attitude_quat_indi.c.
References float_rates_integrate_fi(), omega_r, FloatRates::p, PERIODIC_FREQUENCY, FloatRates::q, and FloatRates::r.
Referenced by attitude_run_indi(), lms_estimation(), and stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:| struct FloatRates g1 |
Definition at line 46 of file stabilization_attitude_quat_indi.c.
Referenced by gain_scheduling_periodic().
| float g2 |
Definition at line 47 of file stabilization_attitude_quat_indi.c.
Referenced by attitude_run_indi(), gain_scheduling_periodic(), and lms_estimation().
| struct FloatRates g_est |
Definition at line 80 of file stabilization_attitude_quat_indi.c.
| struct ReferenceSystem reference_acceleration |
Definition at line 48 of file stabilization_attitude_quat_indi.c.
| struct Int32Eulers stab_att_sp_euler |
with INT32_ANGLE_FRAC
Definition at line 45 of file stabilization_attitude_euler_float.c.
| struct Int32Quat stab_att_sp_quat |
with INT32_QUAT_FRAC
Definition at line 41 of file stabilization_attitude_quat_float.c.
| bool_t use_adaptive_indi |
Definition at line 88 of file stabilization_attitude_quat_indi.c.
Referenced by lms_estimation().
 1.8.8
1.8.8