|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

Rotorcraft navigation functions. More...
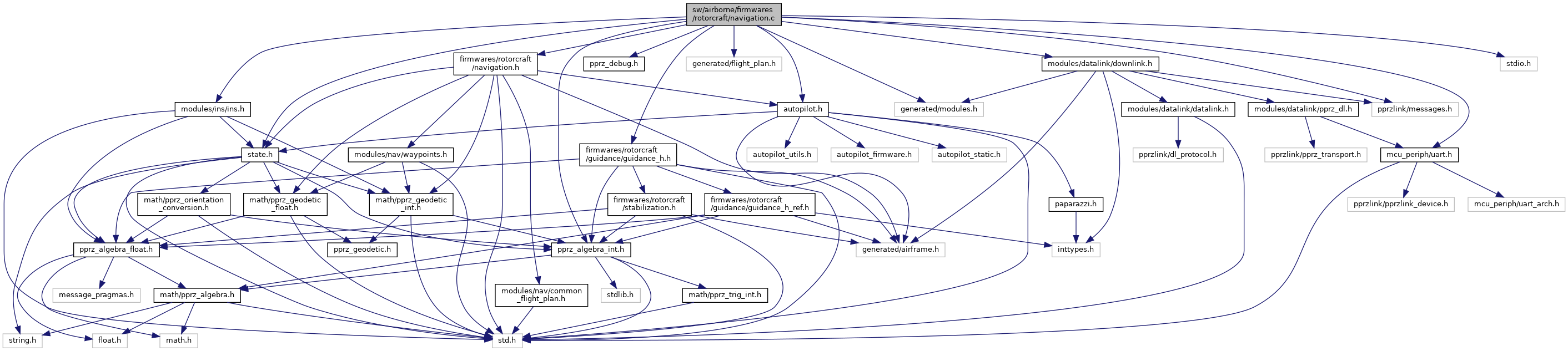
#include "firmwares/rotorcraft/navigation.h"#include "pprz_debug.h"#include "state.h"#include "autopilot.h"#include "generated/modules.h"#include "generated/flight_plan.h"#include "modules/ins/ins.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "math/pprz_algebra_int.h"#include "modules/datalink/downlink.h"#include "pprzlink/messages.h"#include "mcu_periph/uart.h"#include <stdio.h> Include dependency graph for navigation.c:
Include dependency graph for navigation.c:Go to the source code of this file.
Macros | |
| #define | NAV_C |
| #define | CLOSE_TO_WAYPOINT 15.f |
Variables | |
| struct RotorcraftNavigation | nav |
| const float | max_dist_from_home = MAX_DIST_FROM_HOME |
| const float | max_dist2_from_home = MAX_DIST_FROM_HOME * MAX_DIST_FROM_HOME |
| float | flight_altitude |
| Dynamically adjustable, reset to nav_altitude when it is changing. | |
Rotorcraft navigation functions.
Definition in file navigation.c.
Definition at line 140 of file navigation.c.
| #define NAV_C |
Definition at line 29 of file navigation.c.
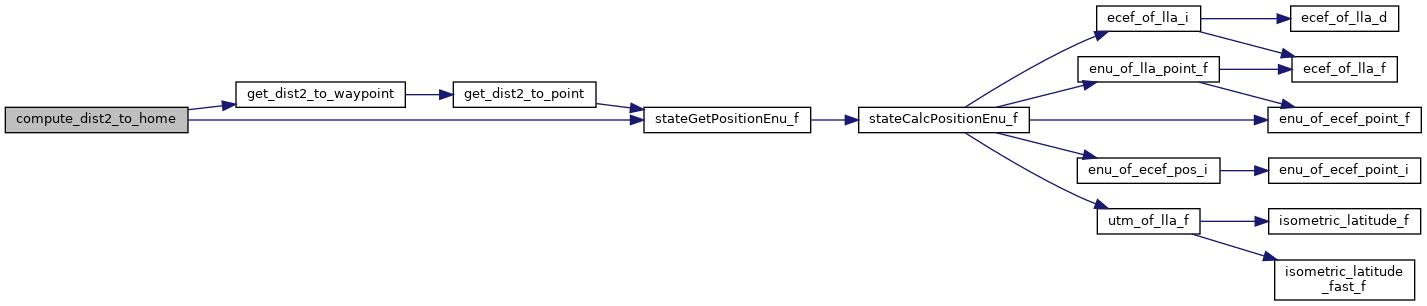
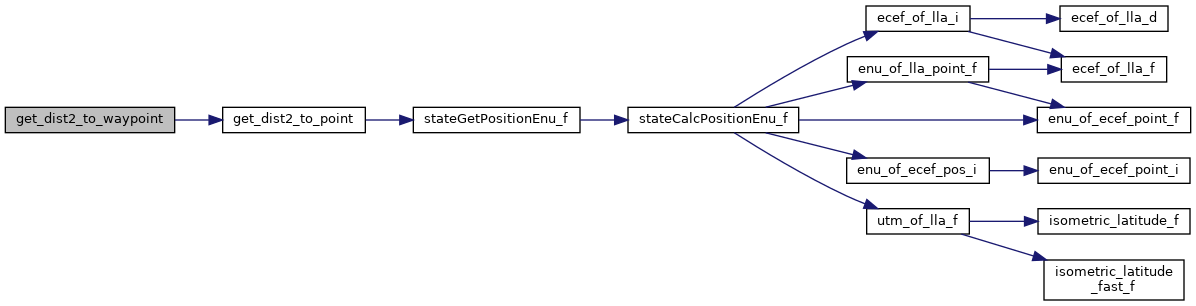
Computes squared distance to the HOME waypoint potentially sets too_far_from_home.
Definition at line 326 of file navigation.c.
References RotorcraftNavigation::dist2_to_home, foo, get_dist2_to_waypoint(), max_dist2_from_home, nav, stateGetPositionEnu_f(), RotorcraftNavigation::too_far_from_home, EnuCoor_f::x, and EnuCoor_f::y.
Referenced by autopilot_static_periodic(), nav_home(), and nav_periodic_task().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 63 of file navigation.c.
Referenced by nav_init().
Here is the caller graph for this function:Definition at line 64 of file navigation.c.
Referenced by nav_init().
Here is the caller graph for this function:Definition at line 61 of file navigation.c.
Referenced by nav_init().
Here is the caller graph for this function:
|
static |
Definition at line 66 of file navigation.c.
Referenced by nav_init().
Here is the caller graph for this function:Definition at line 65 of file navigation.c.
Referenced by nav_init().
Here is the caller graph for this function:
|
static |
Definition at line 62 of file navigation.c.
Referenced by nav_init().
Here is the caller graph for this function:Empty navigation functions set at init.
Definition at line 60 of file navigation.c.
Referenced by nav_init().
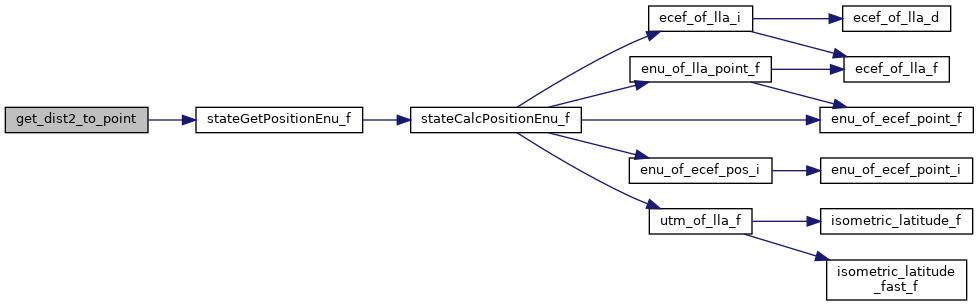
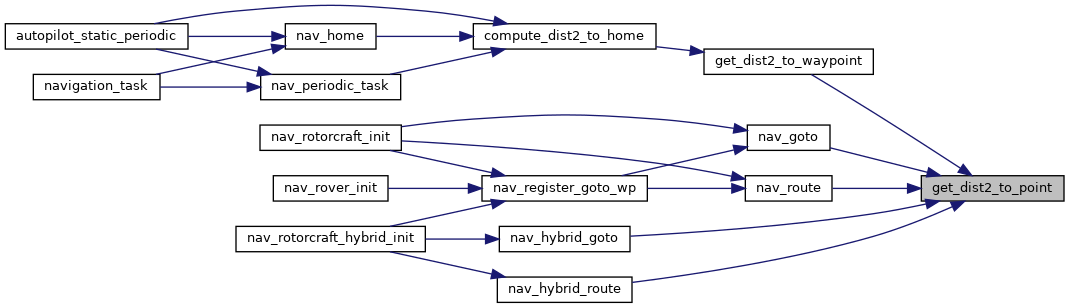
Here is the caller graph for this function:Returns squared horizontal distance to given point.
Definition at line 308 of file navigation.c.
References p, pos_diff, stateGetPositionEnu_f(), FloatVect2::x, EnuCoor_f::x, FloatVect2::y, and EnuCoor_f::y.
Referenced by get_dist2_to_waypoint(), nav_goto(), nav_goto(), nav_hybrid_goto(), nav_hybrid_route(), nav_route(), nav_route(), and rotwing_state_choose_state_by_dist().
Here is the call graph for this function: Here is the caller graph for this function:Returns squared horizontal distance to given waypoint.
Definition at line 318 of file navigation.c.
References get_dist2_to_point(), and waypoints.
Referenced by compute_dist2_to_home().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 143 of file navigation.c.
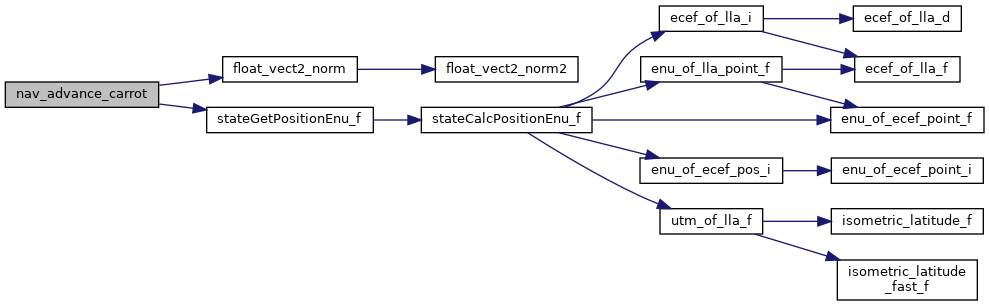
References RotorcraftNavigation::carrot, CLOSE_TO_WAYPOINT, float_vect2_norm(), foo, nav, NAV_CARROT_DIST, stateGetPositionEnu_f(), RotorcraftNavigation::target, VECT2_COPY, VECT2_DIFF, VECT2_SDIV, VECT2_SMUL, VECT2_STRIM, and VECT2_SUM.
Referenced by nav_run().
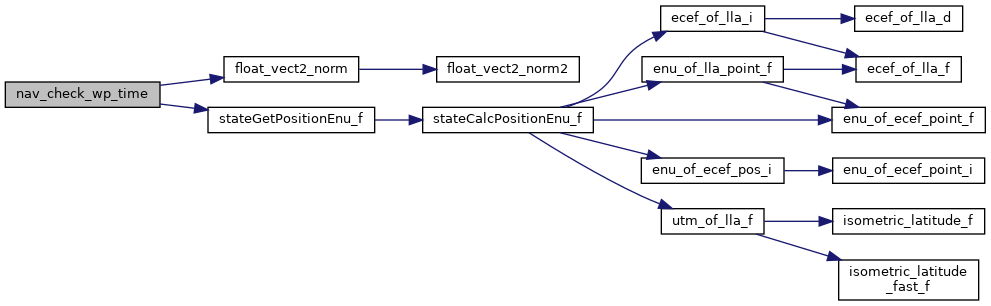
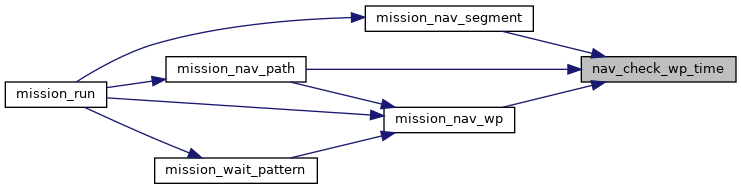
Here is the call graph for this function: Here is the caller graph for this function:Check the time spent in a radius of 'ARRIVED_AT_WAYPOINT' around a wp
Definition at line 180 of file navigation.c.
References ARRIVED_AT_WAYPOINT, autopilot, ENU_BFP_OF_REAL, pprz_autopilot::flight_time, float_vect2_norm(), foo, INT_VECT3_ZERO, stateGetPositionEnu_f(), and VECT2_DIFF.
Referenced by mission_nav_path(), mission_nav_segment(), and mission_nav_wp().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 267 of file navigation.c.
References autopilot, and pprz_autopilot::ground_detected.
Definition at line 282 of file navigation.c.
References float_vect2_norm2(), foo, NavVerticalAltitudeMode, pos_diff, stateGetPositionEnu_f(), VECT2_DIFF, FloatVect2::x, and FloatVect2::y.
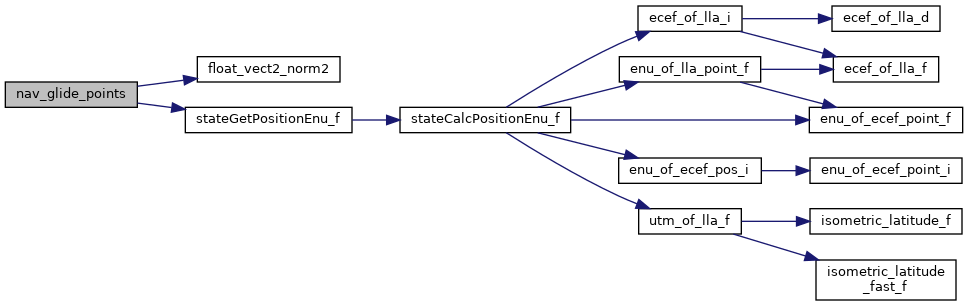
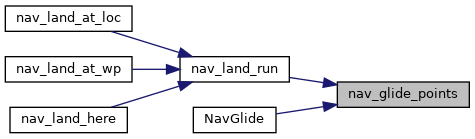
Referenced by nav_land_run(), and NavGlide().
Here is the call graph for this function: Here is the caller graph for this function:Home mode navigation.
Home mode navigation (circle around HOME)
Nominal speed
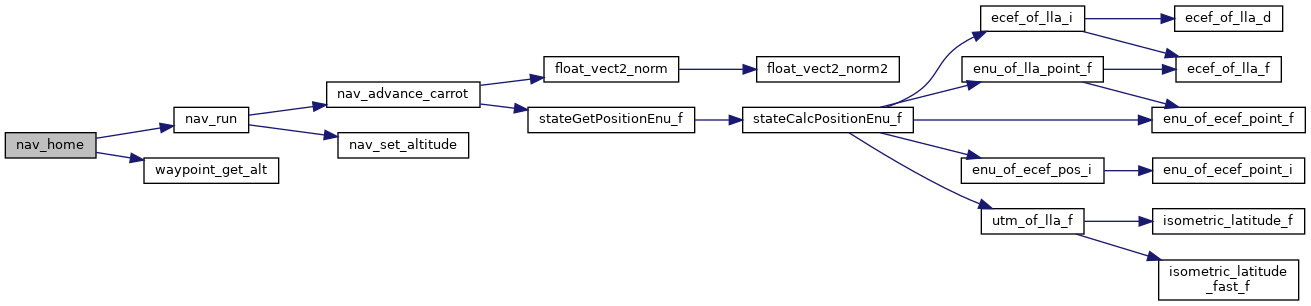
Definition at line 294 of file navigation.c.
References foo, RotorcraftNavigation::horizontal_mode, nav, RotorcraftNavigation::nav_altitude, NAV_HORIZONTAL_MODE_WAYPOINT, nav_run(), NAV_SETPOINT_MODE_POS, NAV_VERTICAL_MODE_ALT, RotorcraftNavigation::setpoint_mode, RotorcraftNavigation::target, VECT3_COPY, RotorcraftNavigation::vertical_mode, waypoint_get_alt(), and waypoints.
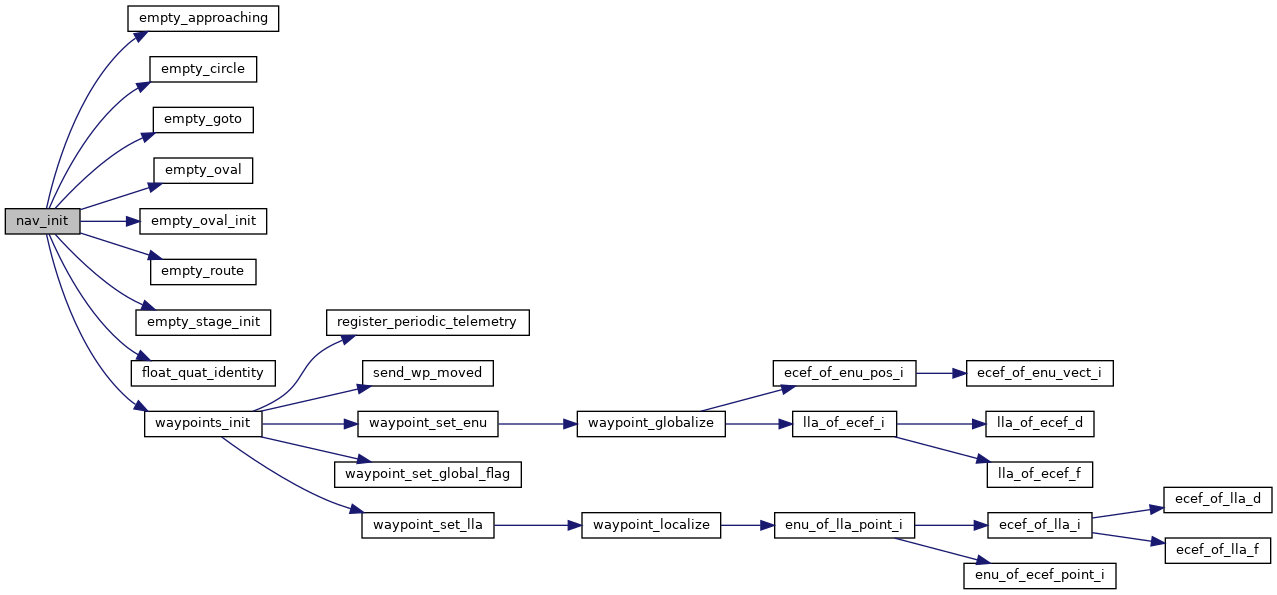
Here is the call graph for this function:Navigation Initialisation.
Definition at line 70 of file navigation.c.
References RotorcraftNavigation::accel, RotorcraftNavigation::carrot, RotorcraftNavigation::climb, RotorcraftNavigation::climb_vspeed, common_flight_plan_init(), DEFAULT_CIRCLE_RADIUS, RotorcraftNavigation::descend_vspeed, RotorcraftNavigation::dist2_to_home, empty_approaching(), empty_circle(), empty_goto(), empty_oval(), empty_oval_init(), empty_route(), empty_stage_init(), RotorcraftNavigation::failsafe_mode_dist2, FAILSAFE_MODE_DISTANCE, flight_altitude, float_quat_identity(), FLOAT_RATES_ZERO, FLOAT_VECT3_ZERO, foo, RotorcraftNavigation::fp_altitude, RotorcraftNavigation::fp_max_speed, RotorcraftNavigation::heading, RotorcraftNavigation::horizontal_mode, nav, RotorcraftNavigation::nav_altitude, RotorcraftNavigation::nav_approaching, RotorcraftNavigation::nav_circle, NAV_CLIMB_VSPEED, NAV_DESCEND_VSPEED, RotorcraftNavigation::nav_goto, NAV_HORIZONTAL_MODE_WAYPOINT, RotorcraftNavigation::nav_oval, RotorcraftNavigation::nav_oval_init, RotorcraftNavigation::nav_route, NAV_SETPOINT_MODE_POS, RotorcraftNavigation::nav_stage_init, NAV_VERTICAL_MODE_ALT, RotorcraftNavigation::pitch, RotorcraftNavigation::quat, RotorcraftNavigation::radius, RotorcraftNavigation::rates, RotorcraftNavigation::roll, RotorcraftNavigation::setpoint_mode, RotorcraftNavigation::speed, RotorcraftNavigation::target, RotorcraftNavigation::throttle, RotorcraftNavigation::too_far_from_home, VECT3_COPY, RotorcraftNavigation::vertical_mode, waypoints, and waypoints_init().
Here is the call graph for this function:needs to be implemented by fixedwing and rotorcraft seperately
Definition at line 247 of file navigation.c.
References nav, RotorcraftNavigation::nav_stage_init, and stage_time.
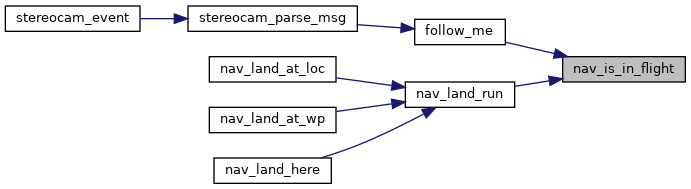
Definition at line 277 of file navigation.c.
References autopilot_in_flight().
Referenced by follow_me(), and nav_land_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 115 of file navigation.c.
References foo, and nav_goto_block().
Here is the call graph for this function:Definition at line 121 of file navigation.c.
References LlaCoor_i::alt, foo, LlaCoor_i::lat, LlaCoor_i::lon, stateGetHmslOrigin_i(), stateGetLlaOrigin_i(), stateIsLocalCoordinateValid(), and waypoint_move_lla().
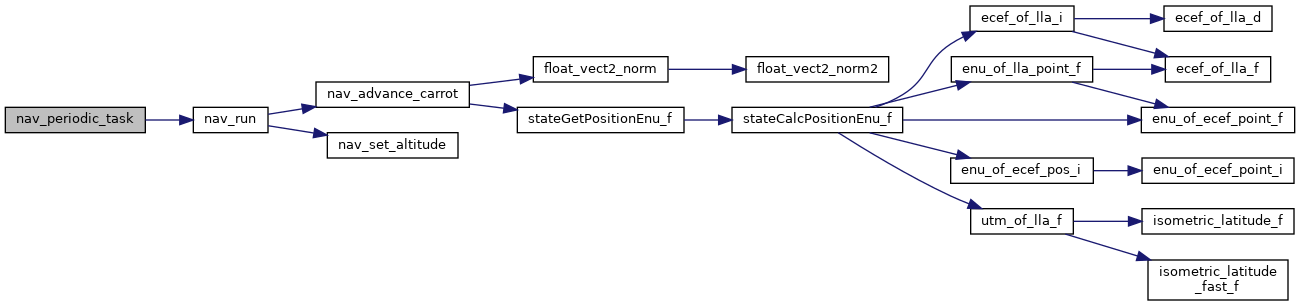
Here is the call graph for this function:Navigation main: call to the code generated from the XML flight plan.
Definition at line 256 of file navigation.c.
References block_time, foo, nav_run(), NAVIGATION_FREQUENCY, and stage_time.
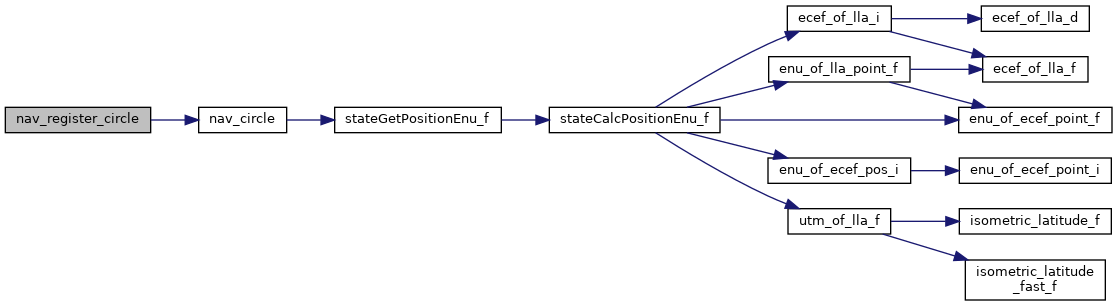
Here is the call graph for this function:| void nav_register_circle | ( | navigation_circle | nav_circle | ) |
Definition at line 399 of file navigation.c.
References nav, RotorcraftNavigation::nav_circle, and nav_circle().
Referenced by nav_rotorcraft_hybrid_init(), nav_rotorcraft_init(), and nav_rover_init().
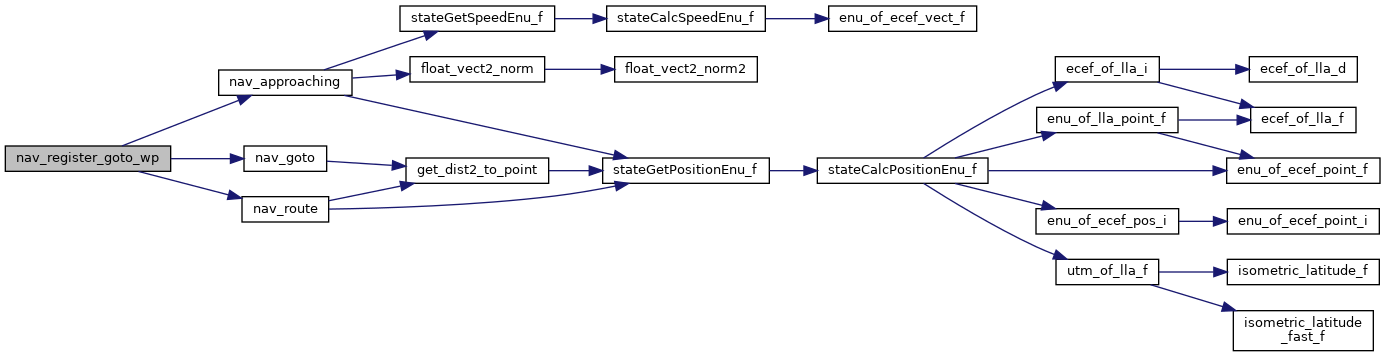
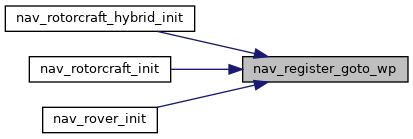
Here is the call graph for this function: Here is the caller graph for this function:| void nav_register_goto_wp | ( | navigation_goto | nav_goto, |
| navigation_route | nav_route, | ||
| navigation_approaching | nav_approaching | ||
| ) |
Registering functions.
Definition at line 392 of file navigation.c.
References nav, RotorcraftNavigation::nav_approaching, nav_approaching(), RotorcraftNavigation::nav_goto, nav_goto(), RotorcraftNavigation::nav_route, and nav_route().
Referenced by nav_rotorcraft_hybrid_init(), nav_rotorcraft_init(), and nav_rover_init().
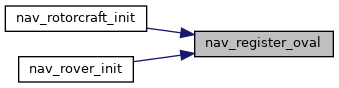
Here is the call graph for this function: Here is the caller graph for this function:| void nav_register_oval | ( | navigation_oval_init | _nav_oval_init, |
| navigation_oval | nav_oval | ||
| ) |
Definition at line 404 of file navigation.c.
References _nav_oval_init(), nav, nav_oval(), RotorcraftNavigation::nav_oval, and RotorcraftNavigation::nav_oval_init.
Referenced by nav_rotorcraft_init(), and nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_register_stage_init | ( | navigation_stage_init | nav_stage_init | ) |
Register functions.
Registering functions.
Definition at line 387 of file navigation.c.
References nav, RotorcraftNavigation::nav_stage_init, and nav_stage_init().
Referenced by nav_rotorcraft_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 241 of file navigation.c.
References foo, INS_RESET_VERTICAL_REF, and waypoints_localize_all().
Here is the call graph for this function:Reset the geographic reference to the current GPS fix.
Definition at line 234 of file navigation.c.
References foo, INS_RESET_REF, and waypoints_localize_all().
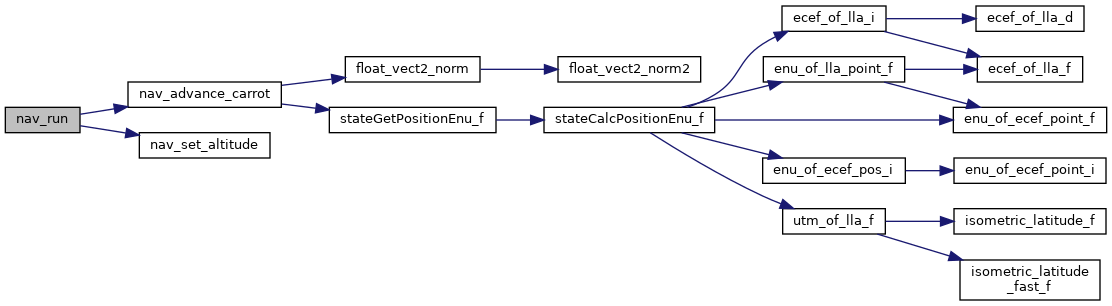
Here is the call graph for this function:Definition at line 165 of file navigation.c.
References RotorcraftNavigation::carrot, nav, nav_advance_carrot(), nav_set_altitude(), RotorcraftNavigation::target, and VECT2_COPY.
Referenced by nav_home(), and nav_periodic_task().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 217 of file navigation.c.
References flight_altitude, foo, RotorcraftNavigation::fp_altitude, nav, RotorcraftNavigation::nav_altitude, and stateGetHmslOrigin_f().
Referenced by nav_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 380 of file navigation.c.
References AP_MODE_FAILSAFE, and autopilot_set_mode().
Here is the call graph for this function:Set heading to the current yaw angle.
Definition at line 375 of file navigation.c.
References RotorcraftNavigation::heading, nav, FloatEulers::psi, and stateGetNedToBodyEulers_f().
Here is the call graph for this function:Set nav_heading in degrees.
Definition at line 344 of file navigation.c.
References foo, and nav_set_heading_rad().
Referenced by nav_survey_poly_setup(), and nav_survey_rectangle_rotorcraft_setup().
Here is the call graph for this function: Here is the caller graph for this function:Set nav_heading in radians.
heading utility functions
Definition at line 337 of file navigation.c.
References RotorcraftNavigation::heading, nav, and NormCourseRad.
Referenced by nav_set_heading_deg(), and stereocam_droplet_periodic().
Here is the caller graph for this function:Set heading to point towards x,y position in local coordinates.
Definition at line 350 of file navigation.c.
References foo, RotorcraftNavigation::heading, nav, pos_diff, stateGetPositionEnu_f(), target, VECT2_DIFF, VECT2_NORM2, FloatVect2::x, and FloatVect2::y.
Referenced by nav_set_heading_towards_target(), and nav_set_heading_towards_waypoint().
Here is the call graph for this function: Here is the caller graph for this function:Set heading in the direction of the target.
Definition at line 369 of file navigation.c.
References nav, nav_set_heading_towards(), RotorcraftNavigation::target, EnuCoor_f::x, and EnuCoor_f::y.
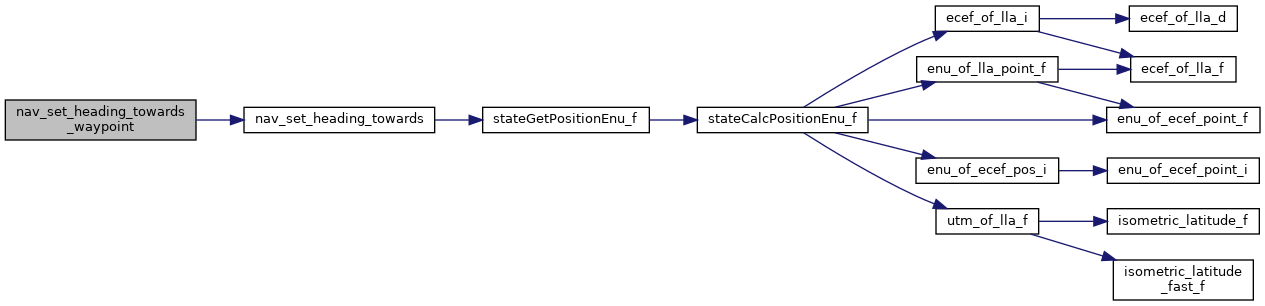
Here is the call graph for this function:Set heading in the direction of a waypoint.
Definition at line 363 of file navigation.c.
References nav_set_heading_towards(), WaypointX, and WaypointY.
Here is the call graph for this function:| float flight_altitude |
Dynamically adjustable, reset to nav_altitude when it is changing.
Definition at line 56 of file navigation.c.
Referenced by nav_init(), and nav_set_altitude().
| const float max_dist2_from_home = MAX_DIST_FROM_HOME * MAX_DIST_FROM_HOME |
Definition at line 54 of file navigation.c.
Referenced by compute_dist2_to_home().
| const float max_dist_from_home = MAX_DIST_FROM_HOME |
Definition at line 53 of file navigation.c.
Referenced by mission_point_of_lla().
| struct RotorcraftNavigation nav |
Definition at line 51 of file navigation.c.
Referenced by airspeed_consistency_periodic(), autopilot_static_on_rc_frame(), autopilot_static_periodic(), compute_dist2_to_home(), control_mixing_heewing_nav_run(), follow_diagonal_approach(), follow_me(), guidance_h_from_nav(), guidance_h_nav_enter(), guidance_h_update_reference(), guidance_indi_enter(), guidance_pid_h_enter(), guidance_plane_attitude_from_nav(), guidance_plane_set_pitch(), guidance_plane_thrust_from_nav(), guidance_v_from_nav(), gvf_control_2D(), gvf_nav_approaching(), increase_nav_heading(), increase_nav_heading(), ins_ekf2_publish_attitude(), mission_nav_circle(), mission_nav_path(), mission_nav_segment(), mission_nav_wp(), nav_advance_carrot(), nav_circle(), nav_circle(), nav_goto(), nav_goto(), nav_heli_spinup_run(), nav_heli_spinup_setup(), nav_home(), nav_hybrid_circle(), nav_hybrid_goto(), nav_hybrid_route(), nav_init(), nav_init_stage(), nav_land_run(), nav_oval(), nav_poles_run(), nav_register_circle(), nav_register_circle(), nav_register_goto_wp(), nav_register_goto_wp(), nav_register_oval(), nav_register_oval(), nav_register_stage_init(), nav_route(), nav_route(), nav_run(), nav_set_altitude(), nav_set_heading_current(), nav_set_heading_rad(), nav_set_heading_towards(), nav_set_heading_towards_target(), nav_survey_hybrid_run(), nav_survey_poly_run(), nav_survey_rectangle_rotorcraft_run(), nav_survey_rectangle_rotorcraft_setup(), object_tracking_run(), oneloop_from_nav(), rotorcraft_cam_periodic(), run_avoid_navigation_onvision(), send_fp(), send_nav_status(), send_nav_status(), set_exception_flag(), and stereocam_droplet_periodic().