|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
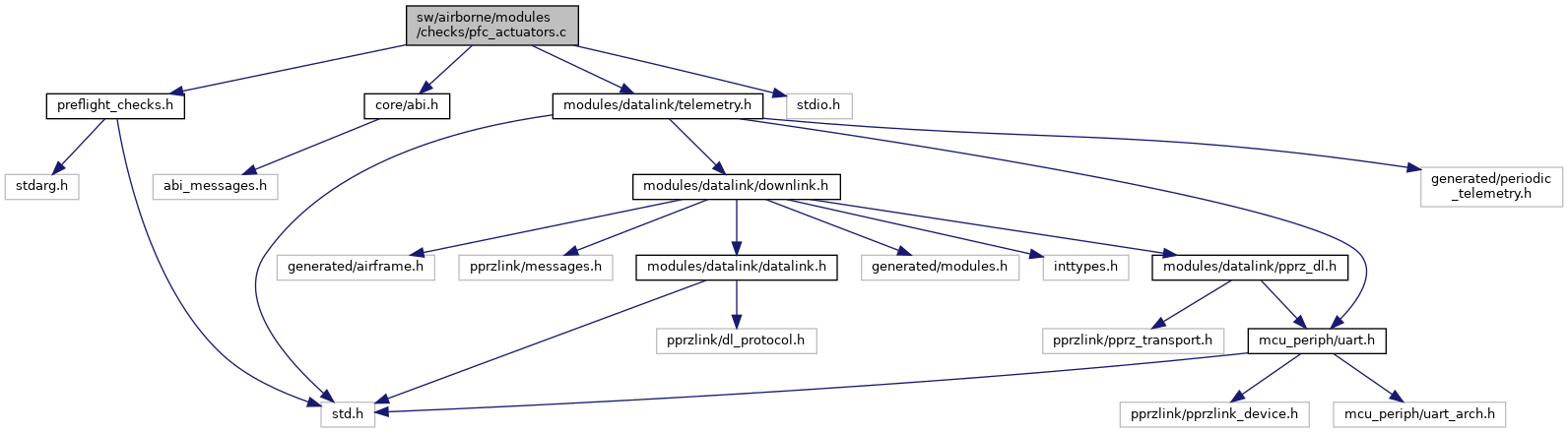
#include "preflight_checks.h"#include "core/abi.h"#include "modules/datalink/telemetry.h"#include <stdio.h>#include <math.h> Include dependency graph for pfc_actuators.c:
Include dependency graph for pfc_actuators.c:Go to the source code of this file.
Data Structures | |
| struct | pfc_actuator_t |
| The configuration struct of the actuator. More... | |
| struct | pfc_actuators_t |
Macros | |
| #define | PFC_ACTUATORS_MAX_ANGLE_ERROR 0.05f |
| Maximum error for the angle of the actuators (rad) | |
| #define | PFC_ACTUATORS_MAX_RPM_ERROR 250.0f |
| Maximum error for the RPM of the actuators. | |
| #define | PFC_ACTUATORS_DEBUG false |
| Enable debugging to set the expected feedback values. | |
| #define | pfc_actuators_debug(...) |
| Send a debug message to the ground station. | |
Enumerations | |
| enum | pfc_actuators_state_t { PFC_ACTUATORS_STATE_INIT , PFC_ACTUATORS_STATE_RUNNING , PFC_ACTUATORS_STATE_SUCCESS , PFC_ACTUATORS_STATE_ERROR } |
| The status of the preflight checks. More... | |
| enum | pfc_actuator_state_t { PFC_ACTUATOR_STATE_WAIT , PFC_ACTUATOR_STATE_LOW , PFC_ACTUATOR_STATE_HIGH } |
| The state of the actuator during the test. More... | |
Functions | |
| static void | pfc_actuators_cb (struct preflight_result_t *result) |
| Check the actuators with feedback. | |
| static void | pfc_act_feedback_cb (uint8_t sender_id, struct act_feedback_t *feedback, uint8_t num_act) |
| Callback for the actuator feedback. | |
| static void | pfc_actuators_error (const char *fmt,...) |
| Send an error message to the ground station. | |
| void | pfc_actuators_init (void) |
| Register the preflight checks for the actuators. | |
| void | pfc_actuators_run (void) |
| Move the actuators, should be put in the command laws. | |
| void | pfc_actuators_start (bool start) |
| Start the actuator testing. | |
| int16_t | pfc_actuators_value (uint8_t idx, int16_t value) |
| Get the actuator value in the command laws to move the actuator during the preflight checks. | |
Variables | |
| static struct pfc_actuator_t | pfc_acts [] = PFC_ACTUATORS |
| static struct pfc_actuators_t | pfc_actuators |
| static struct preflight_check_t | actuators_pfc |
| static abi_event | act_feedback_ev |
Definition in file pfc_actuators.c.
| struct pfc_actuator_t |
The configuration struct of the actuator.
Definition at line 76 of file pfc_actuators.c.
| Data Fields | ||
|---|---|---|
| uint8_t | feedback_id | The feedback id of the actuator (255 for none) |
| uint8_t | feedback_id2 | The secondary feedback id of the actuator (255 for none) |
| int16_t | high | The high value to set the actuator to. |
| float | high_feedback | The expected feedback value when the actuator is high. |
| int16_t | low | The low value to set the actuator to. |
| float | low_feedback | The expected feedback value when the actuator is low. |
| float | timeout | The timeout for the actuator to move. |
| struct pfc_actuators_t |
Definition at line 88 of file pfc_actuators.c.
| Data Fields | ||
|---|---|---|
| uint8_t | act_idx | The current actuator index. |
| uint8_t | act_nb | The number of actuators. |
| float | act_start_time | The start time of the actuator (during the test) |
| enum pfc_actuator_state_t | act_state | The state of the actuator (during the test) |
| float | last_feedback | The last measured feedback value of the actuator. |
| float | last_feedback2 | The last measured secondary feedback value of the actuator. |
| float | last_feedback_err | The last expected feedback error of the actuator (based on RPM/angle) |
| float | last_feedback_err2 | The last expected secondary feedback error of the actuator (based on RPM/angle) |
| enum pfc_actuators_state_t | state | The state of the preflight checks. |
Enable debugging to set the expected feedback values.
Definition at line 51 of file pfc_actuators.c.
| #define pfc_actuators_debug | ( | ... | ) |
Send a debug message to the ground station.
Definition at line 135 of file pfc_actuators.c.
Maximum error for the angle of the actuators (rad)
Definition at line 37 of file pfc_actuators.c.
| #define PFC_ACTUATORS_MAX_RPM_ERROR 250.0f |
Maximum error for the RPM of the actuators.
Definition at line 44 of file pfc_actuators.c.
The state of the actuator during the test.
| Enumerator | |
|---|---|
| PFC_ACTUATOR_STATE_WAIT | |
| PFC_ACTUATOR_STATE_LOW | |
| PFC_ACTUATOR_STATE_HIGH | |
Definition at line 67 of file pfc_actuators.c.
The status of the preflight checks.
| Enumerator | |
|---|---|
| PFC_ACTUATORS_STATE_INIT | |
| PFC_ACTUATORS_STATE_RUNNING | |
| PFC_ACTUATORS_STATE_SUCCESS | |
| PFC_ACTUATORS_STATE_ERROR | |
Definition at line 57 of file pfc_actuators.c.
|
static |
Callback for the actuator feedback.
Definition at line 290 of file pfc_actuators.c.
References pfc_actuators_t::act_idx, pfc_actuators_t::act_nb, pfc_actuator_t::feedback_id, pfc_actuator_t::feedback_id2, foo, idx, pfc_actuators_t::last_feedback, pfc_actuators_t::last_feedback2, pfc_actuators_t::last_feedback_err, pfc_actuators_t::last_feedback_err2, pfc_acts, pfc_actuators, PFC_ACTUATORS_MAX_ANGLE_ERROR, PFC_ACTUATORS_MAX_RPM_ERROR, PFC_ACTUATORS_STATE_RUNNING, act_feedback_t::act_feedback_set_t::position, act_feedback_t::position, act_feedback_t::act_feedback_set_t::rpm, act_feedback_t::rpm, act_feedback_t::set, and pfc_actuators_t::state.
Referenced by pfc_actuators_init().
Here is the caller graph for this function:
|
static |
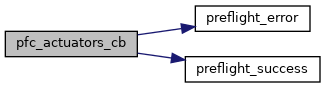
Check the actuators with feedback.
| result | The result of the preflight checks |
Definition at line 269 of file pfc_actuators.c.
References pfc_actuators_t::act_idx, pfc_actuators_t::act_nb, pfc_actuators, PFC_ACTUATORS_STATE_ERROR, PFC_ACTUATORS_STATE_INIT, PFC_ACTUATORS_STATE_RUNNING, PFC_ACTUATORS_STATE_SUCCESS, preflight_error(), preflight_success(), and pfc_actuators_t::state.
Referenced by pfc_actuators_init().
Here is the call graph for this function: Here is the caller graph for this function:Send an error message to the ground station.
| fmt | The format of the message |
| ... | The arguments for the format |
Definition at line 115 of file pfc_actuators.c.
References DefaultChannel, DefaultDevice, foo, and msg.
Referenced by pfc_actuators_run().
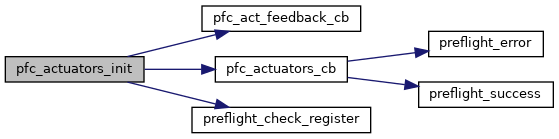
Here is the caller graph for this function:Register the preflight checks for the actuators.
Definition at line 141 of file pfc_actuators.c.
References ABI_BROADCAST, act_feedback_ev, pfc_actuators_t::act_idx, pfc_actuators_t::act_nb, pfc_actuators_t::act_state, actuators_pfc, foo, pfc_actuators_t::last_feedback, pfc_actuators_t::last_feedback2, pfc_act_feedback_cb(), pfc_acts, PFC_ACTUATOR_STATE_WAIT, pfc_actuators, pfc_actuators_cb(), PFC_ACTUATORS_STATE_INIT, preflight_check_register(), and pfc_actuators_t::state.
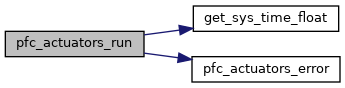
Here is the call graph for this function:Move the actuators, should be put in the command laws.
Definition at line 156 of file pfc_actuators.c.
References pfc_actuators_t::act_idx, pfc_actuators_t::act_nb, pfc_actuators_t::act_start_time, pfc_actuators_t::act_state, foo, get_sys_time_float(), pfc_actuators_t::last_feedback, pfc_actuators_t::last_feedback2, pfc_actuators_t::last_feedback_err, pfc_actuators_t::last_feedback_err2, pfc_acts, PFC_ACTUATOR_STATE_HIGH, PFC_ACTUATOR_STATE_LOW, PFC_ACTUATOR_STATE_WAIT, pfc_actuators, PFC_ACTUATORS_DEBUG, pfc_actuators_debug, pfc_actuators_error(), PFC_ACTUATORS_STATE_ERROR, PFC_ACTUATORS_STATE_RUNNING, PFC_ACTUATORS_STATE_SUCCESS, and pfc_actuators_t::state.
Here is the call graph for this function:Start the actuator testing.
Definition at line 227 of file pfc_actuators.c.
References pfc_actuators_t::act_idx, pfc_actuators_t::act_start_time, pfc_actuators_t::act_state, foo, pfc_actuators_t::last_feedback, pfc_actuators_t::last_feedback2, PFC_ACTUATOR_STATE_WAIT, pfc_actuators, PFC_ACTUATORS_STATE_INIT, PFC_ACTUATORS_STATE_RUNNING, and pfc_actuators_t::state.
Get the actuator value in the command laws to move the actuator during the preflight checks.
| idx | The index of the actuator in the preflight checks struct |
| value | The value if no checks are performed on this actuator |
Definition at line 249 of file pfc_actuators.c.
References pfc_actuators_t::act_idx, pfc_actuators_t::act_state, pfc_actuator_t::high, idx, pfc_actuator_t::low, pfc_acts, PFC_ACTUATOR_STATE_HIGH, PFC_ACTUATOR_STATE_LOW, pfc_actuators, PFC_ACTUATORS_STATE_RUNNING, and pfc_actuators_t::state.
|
static |
Definition at line 106 of file pfc_actuators.c.
Referenced by pfc_actuators_init(), and stabilization_indi_init().
|
static |
Definition at line 105 of file pfc_actuators.c.
Referenced by pfc_actuators_init().
|
static |
Definition at line 103 of file pfc_actuators.c.
Referenced by pfc_act_feedback_cb(), pfc_actuators_init(), pfc_actuators_run(), and pfc_actuators_value().
|
static |
Definition at line 104 of file pfc_actuators.c.
Referenced by pfc_act_feedback_cb(), pfc_actuators_cb(), pfc_actuators_init(), pfc_actuators_run(), pfc_actuators_start(), and pfc_actuators_value().