|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
ARDrone2 navdata aquisition driver. More...
#include <stdio.h>#include <stdlib.h>#include <fcntl.h>#include <termios.h>#include <unistd.h>#include <string.h>#include <math.h>#include <errno.h>#include <assert.h>#include <pthread.h>#include "std.h"#include "navdata.h"#include "modules/ins/ins.h"#include "modules/ahrs/ahrs.h"#include "modules/core/abi.h"#include "mcu_periph/gpio.h"#include "modules/datalink/telemetry.h"#include "modules/imu/imu.h" Include dependency graph for navdata.c:
Include dependency graph for navdata.c:Go to the source code of this file.
Macros | |
| #define | NAVDATA_FILTER_ID 2 |
| #define | SONAR_OFFSET 880 |
| Sonar offset. | |
| #define | SONAR_SCALE 0.00047 |
| Sonar scale. | |
Functions | |
| static void * | navdata_read (void *data) |
| Main reading thread This is done asynchronous because the navdata board doesn't support NON_BLOCKING. | |
| static void | navdata_cmd_send (uint8_t cmd) |
| Sends a one byte command. | |
| static bool | navdata_baro_calib (void) |
| Try to receive the baro calibration from the navdata board. | |
| static void | mag_freeze_check (void) |
| Check if the magneto is frozen Unknown why this bug happens. | |
| static void | baro_update_logic (void) |
| Handle the baro(pressure/temperature) logic Sometimes the temperature and pressure are switched because of a bug in the navdata board firmware. | |
| ssize_t | full_write (int fd, const uint8_t *buf, size_t count) |
| Write to fd even while being interrupted. | |
| ssize_t | full_read (int fd, uint8_t *buf, size_t count) |
| Read from fd even while being interrupted. | |
| static void | send_navdata (struct transport_tx *trans, struct link_device *dev) |
| bool | navdata_init () |
| Initialize the navdata board. | |
| static void | navdata_publish_imu (void) |
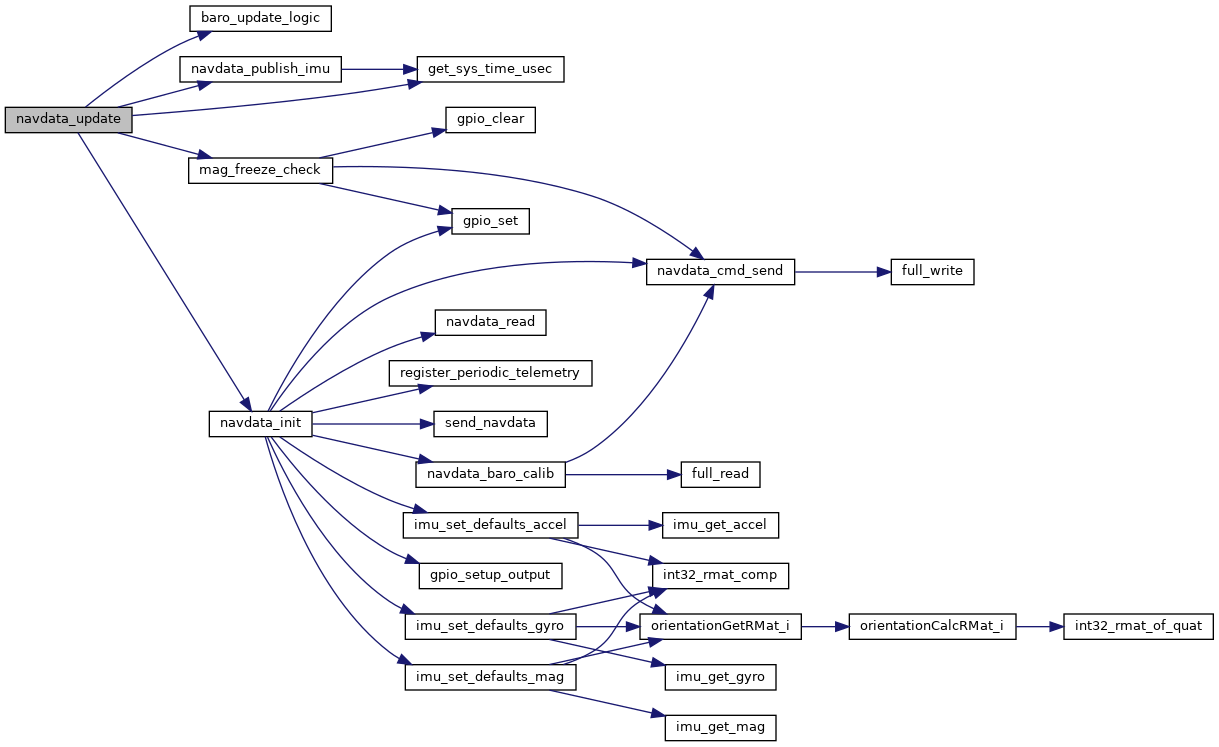
| void | navdata_update () |
| Update the navdata (event loop) | |
Variables | |
| struct navdata_t | navdata |
| static uint8_t | navdata_buffer [NAVDATA_PACKET_SIZE] |
| Buffer filled in the thread (maximum one navdata packet) | |
| static bool | navdata_available = false |
| flag to indicate new packet is available in buffer | |
| static pthread_mutex_t | navdata_mutex = PTHREAD_MUTEX_INITIALIZER |
| static pthread_cond_t | navdata_cond = PTHREAD_COND_INITIALIZER |
| static const struct FloatRates | gyro_scale_f = { 4.359f, 4.359f, 4.359f } |
| Default gyro scale. | |
| static const struct FloatVect3 | accel_scale_f = { 19.5f, 19.5f, 19.5f } |
| Default accel scale/neutral. | |
| static const struct Int32Vect3 | accel_neutral |
| static const struct FloatVect3 | mag_scale_f = {16, 16, 16} |
| Default mag scale. | |
ARDrone2 navdata aquisition driver.
The ADRrone2 provides a navdata stream of packets containing info about all sensors at a rate of 200Hz.
Definition in file navdata.c.
| #define SONAR_OFFSET 880 |
| #define SONAR_SCALE 0.00047 |
Handle the baro(pressure/temperature) logic Sometimes the temperature and pressure are switched because of a bug in the navdata board firmware.
Definition at line 535 of file navdata.c.
References navdata_t::baro_available, foo, navdata_t::measure, navdata, navdata_measure_t::pressure, and navdata_measure_t::temperature_pressure.
Referenced by navdata_update().
Here is the caller graph for this function:Read from fd even while being interrupted.
Definition at line 131 of file navdata.c.
Referenced by actuators_ardrone_cmd(), and navdata_baro_calib().
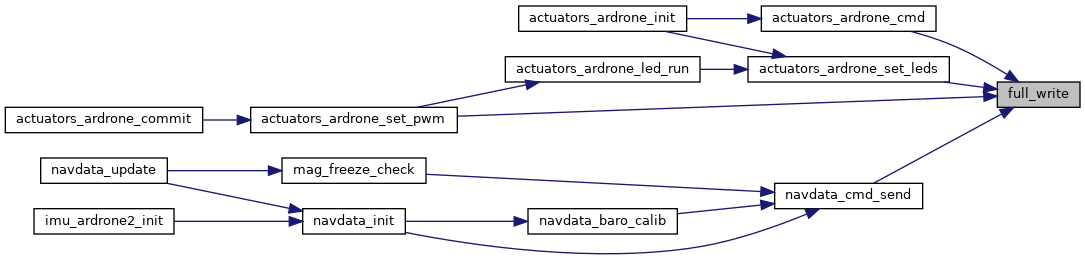
Here is the caller graph for this function:Write to fd even while being interrupted.
Definition at line 111 of file navdata.c.
Referenced by actuators_ardrone_cmd(), actuators_ardrone_set_leds(), actuators_ardrone_set_pwm(), and navdata_cmd_send().
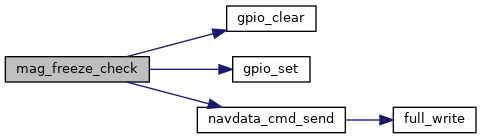
Here is the caller graph for this function:Check if the magneto is frozen Unknown why this bug happens.
Definition at line 489 of file navdata.c.
References ARDRONE_GPIO_PIN_NAVDATA, ARDRONE_GPIO_PORT, foo, gpio_clear(), gpio_set(), navdata_t::imu_lost, navdata_t::lost_imu_frames, navdata_t::measure, navdata_measure_t::mx, navdata, navdata_cmd_send(), NAVDATA_CMD_START, and NAVDATA_CMD_STOP.
Referenced by navdata_update().
Here is the call graph for this function: Here is the caller graph for this function:Try to receive the baro calibration from the navdata board.
Definition at line 457 of file navdata.c.
References bmp180_calib_t::ac1, bmp180_calib_t::ac2, bmp180_calib_t::ac3, bmp180_calib_t::ac4, bmp180_calib_t::ac5, bmp180_calib_t::ac6, bmp180_calib_t::b1, bmp180_calib_t::b2, navdata_t::bmp180_calib, navdata_t::fd, foo, full_read(), bmp180_calib_t::mb, bmp180_calib_t::mc, bmp180_calib_t::md, navdata, NAVDATA_CMD_BARO_CALIB, and navdata_cmd_send().
Referenced by navdata_init().
Here is the call graph for this function: Here is the caller graph for this function:Sends a one byte command.
Definition at line 448 of file navdata.c.
References navdata_t::fd, full_write(), and navdata.
Referenced by mag_freeze_check(), navdata_baro_calib(), and navdata_init().
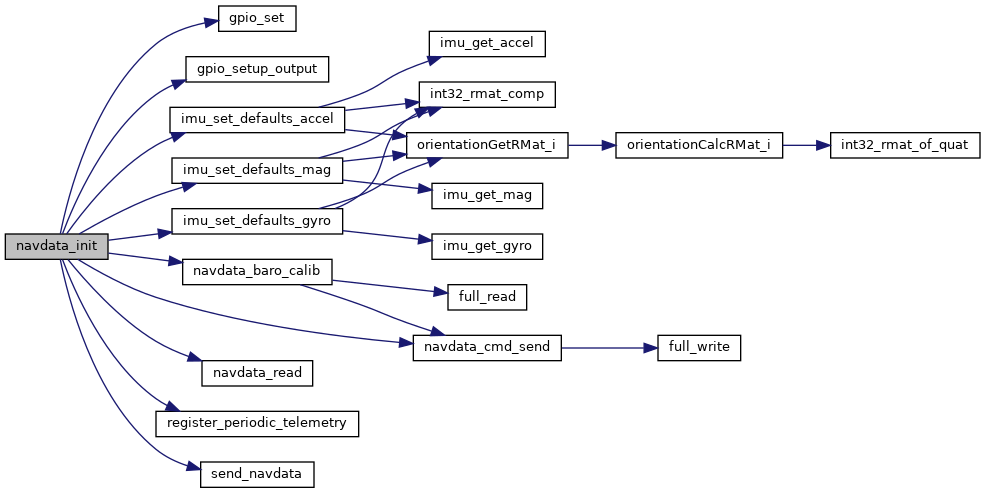
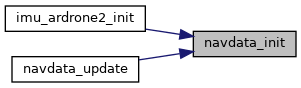
Here is the call graph for this function: Here is the caller graph for this function:Initialize the navdata board.
Definition at line 194 of file navdata.c.
References accel_neutral, accel_scale_f, ARDRONE_GPIO_PIN_NAVDATA, ARDRONE_GPIO_PORT, B460800, navdata_t::baro_available, navdata_t::baro_calibrated, navdata_t::checksum_errors, DefaultPeriodic, navdata_t::fd, foo, gpio_set(), gpio_setup_output(), gyro_scale_f, IMU_BOARD_ID, navdata_t::imu_lost, imu_set_defaults_accel(), imu_set_defaults_gyro(), imu_set_defaults_mag(), navdata_t::is_initialized, navdata_t::last_packet_number, navdata_t::lost_imu_frames, mag_scale_f, navdata, navdata_available, navdata_baro_calib(), navdata_cmd_send(), NAVDATA_CMD_START, NAVDATA_CMD_STOP, NAVDATA_PACKET_SIZE, navdata_read(), navdata_t::packetsRead, register_periodic_telemetry(), send_navdata(), and navdata_t::totalBytesRead.
Referenced by imu_ardrone2_init(), and navdata_update().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 354 of file navdata.c.
References navdata_measure_t::ax, navdata_measure_t::ay, navdata_measure_t::az, foo, get_sys_time_usec(), IMU_BOARD_ID, navdata_t::measure, navdata_measure_t::mx, navdata_measure_t::my, navdata_measure_t::mz, navdata, navdata_measure_t::temperature_acc, navdata_measure_t::temperature_gyro, navdata_measure_t::vx, navdata_measure_t::vy, and navdata_measure_t::vz.
Referenced by navdata_update().
Here is the call graph for this function: Here is the caller graph for this function:Main reading thread This is done asynchronous because the navdata board doesn't support NON_BLOCKING.
Definition at line 283 of file navdata.c.
References checksum, navdata_t::checksum_errors, navdata_t::fd, foo, navdata, navdata_available, navdata_buffer, navdata_cond, navdata_mutex, NAVDATA_PACKET_SIZE, NAVDATA_START_BYTE, navdata_t::totalBytesRead, and TRUE.
Referenced by navdata_init().
Here is the caller graph for this function:Update the navdata (event loop)
Definition at line 382 of file navdata.c.
References AGL_SONAR_ARDRONE2_ID, baro_update_logic(), foo, get_sys_time_usec(), navdata_t::is_initialized, navdata_t::last_packet_number, navdata_t::lost_imu_frames, mag_freeze_check(), navdata_t::measure, navdata, navdata_available, navdata_buffer, navdata_cond, navdata_init(), navdata_mutex, NAVDATA_PACKET_SIZE, navdata_publish_imu(), navdata_measure_t::nu_trame, p, navdata_t::packetsRead, navdata_measure_t::pressure, SONAR_OFFSET, SONAR_SCALE, navdata_measure_t::temperature_pressure, and navdata_measure_t::ultrasound.
Here is the call graph for this function:
|
static |
Definition at line 152 of file navdata.c.
References navdata_measure_t::ax, navdata_measure_t::ay, navdata_measure_t::az, navdata_t::checksum_errors, navdata_measure_t::chksum, dev, navdata_measure_t::flag_echo_ini, foo, navdata_measure_t::gradient, navdata_t::measure, navdata_measure_t::mx, navdata_measure_t::my, navdata_measure_t::mz, navdata, navdata_measure_t::nb_echo, navdata_measure_t::nu_trame, navdata_measure_t::pressure, navdata_measure_t::sum_echo, navdata_measure_t::taille, navdata_measure_t::temperature_acc, navdata_measure_t::temperature_gyro, navdata_measure_t::temperature_pressure, navdata_measure_t::ultrasound, navdata_measure_t::us_association_echo, navdata_measure_t::us_curve_ref, navdata_measure_t::us_curve_time, navdata_measure_t::us_curve_value, navdata_measure_t::us_debut_echo, navdata_measure_t::us_distance_echo, navdata_measure_t::us_fin_echo, navdata_measure_t::vx, navdata_measure_t::vy, and navdata_measure_t::vz.
Referenced by navdata_init().
Here is the caller graph for this function:
|
static |
Definition at line 99 of file navdata.c.
Referenced by imu_nps_init(), navdata_init(), and sensors_hitl_init().
|
static |
Default accel scale/neutral.
Definition at line 97 of file navdata.c.
Referenced by imu_aspirin_i2c_init(), imu_aspirin_init(), imu_nps_init(), imu_px4_init(), navdata_init(), and sensors_hitl_init().
|
static |
Default gyro scale.
Definition at line 92 of file navdata.c.
Referenced by imu_aspirin_i2c_init(), imu_aspirin_init(), imu_nps_init(), imu_px4_init(), navdata_init(), and sensors_hitl_init().
|
static |
Default mag scale.
Definition at line 106 of file navdata.c.
Referenced by imu_nps_init(), navdata_init(), and sensors_hitl_init().
| struct navdata_t navdata |
Definition at line 59 of file navdata.c.
Referenced by ardrone_baro_event(), baro_apply_calibration(), baro_apply_calibration_temp(), baro_update_logic(), mag_freeze_check(), navdata_baro_calib(), navdata_cmd_send(), navdata_init(), navdata_publish_imu(), navdata_read(), navdata_update(), and send_navdata().
flag to indicate new packet is available in buffer
Definition at line 64 of file navdata.c.
Referenced by navdata_init(), navdata_read(), and navdata_update().
|
static |
Buffer filled in the thread (maximum one navdata packet)
Definition at line 62 of file navdata.c.
Referenced by navdata_read(), and navdata_update().
|
static |
Definition at line 68 of file navdata.c.
Referenced by navdata_read(), and navdata_update().
|
static |
Definition at line 67 of file navdata.c.
Referenced by navdata_read(), and navdata_update().