|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include <stdint.h>#include <stdbool.h>#include <stdlib.h> Include dependency graph for cc2500_compat.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for cc2500_compat.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | attitude_values_t |
| struct | attitude_t |
| struct | pt1Filter_s |
| struct | pidGains_s |
| struct | pidProfile_s |
| struct | gpio_t |
| struct | controlRateConfig_t |
Typedefs | |
| typedef int32_t | timeDelta_t |
| typedef uint32_t | timeMs_t |
| typedef uint32_t | timeUs_t |
| typedef struct pt1Filter_s | pt1Filter_t |
| typedef void(* | gpiofnptr_t) (uint32_t port, uint16_t pin) |
| typedef struct gpio_t * | IO_t |
| typedef IO_t | ioTag_t |
Enumerations | |
| enum | features_e { FEATURE_RX_PPM = 1 << 0 , FEATURE_RX_SERIAL = 1 << 3 , FEATURE_TELEMETRY = 1 << 10 , FEATURE_RX_PARALLEL_PWM = 1 << 13 , FEATURE_RX_MSP = 1 << 14 , FEATURE_RSSI_ADC = 1 << 15 , FEATURE_RX_SPI = 1 << 25 } |
| enum | ioconfig_t { IOCFG_OUT_PP , IOCFG_IN_FLOATING , IOCFG_IPU } |
| enum | resourceOwner_e { OWNER_RX_SPI_EXTI , OWNER_RX_SPI_BIND , OWNER_LED } |
Variables | |
| struct attitude_t | bf_attitude |
| struct pidProfile_s * | currentPidProfile |
| controlRateConfig_t * | currentControlRateProfile |
| struct attitude_values_t |
Definition at line 70 of file cc2500_compat.h.
| Data Fields | ||
|---|---|---|
| int8_t | pitch | |
| int8_t | roll | |
| int8_t | yaw | |
| struct attitude_t |
Definition at line 75 of file cc2500_compat.h.
Collaboration diagram for attitude_t:| Data Fields | ||
|---|---|---|
| struct attitude_values_t | values | |
| struct pt1Filter_s |
Definition at line 107 of file cc2500_compat.h.
| Data Fields | ||
|---|---|---|
| float | k | |
| float | state | |
| struct pidGains_s |
Definition at line 123 of file cc2500_compat.h.
| Data Fields | ||
|---|---|---|
| uint8_t | D | |
| uint8_t | I | |
| uint8_t | P | |
| struct pidProfile_s |
Definition at line 128 of file cc2500_compat.h.
Collaboration diagram for pidProfile_s:| Data Fields | ||
|---|---|---|
| struct pidGains_s | pid[1] | |
| struct gpio_t |
Definition at line 199 of file cc2500_compat.h.
| Data Fields | ||
|---|---|---|
| gpiofnptr_t | hi | |
| gpiofnptr_t | lo | |
| uint16_t | pin | |
| uint32_t | port | |
| struct controlRateConfig_t |
Definition at line 244 of file cc2500_compat.h.
| Data Fields | ||
|---|---|---|
| uint8_t | rates[1] | |
| #define ADC_EXTERNAL1 1 |
Definition at line 180 of file cc2500_compat.h.
| #define adcGetChannel | ( | channel | ) | bf_adcGetChannel(channel) |
Definition at line 182 of file cc2500_compat.h.
| #define ARMING_FLAG | ( | ... | ) | 1 |
Definition at line 236 of file cc2500_compat.h.
| #define attitude bf_attitude |
Definition at line 79 of file cc2500_compat.h.
Definition at line 62 of file cc2500_compat.h.
| #define delayMicroseconds | ( | us | ) | bf_delayMicroseconds(us) |
Definition at line 168 of file cc2500_compat.h.
Definition at line 86 of file cc2500_compat.h.
| #define FD_PITCH 0 |
Definition at line 242 of file cc2500_compat.h.
| #define FD_ROLL 0 |
Definition at line 241 of file cc2500_compat.h.
| #define FD_YAW 0 |
Definition at line 243 of file cc2500_compat.h.
| #define featureIsEnabled | ( | mask | ) | bf_featureIsEnabled(mask) |
Definition at line 163 of file cc2500_compat.h.
| #define FLIGHT_MODE | ( | ... | ) | 0 |
Definition at line 237 of file cc2500_compat.h.
| #define getAmperage | ( | ) | bf_getAmperage() |
Definition at line 281 of file cc2500_compat.h.
| #define getBatteryCellCount | ( | ) | bf_getBatteryCellCount() |
Definition at line 276 of file cc2500_compat.h.
| #define getBatteryVoltage | ( | ) | bf_getBatteryVoltage() |
Definition at line 273 of file cc2500_compat.h.
| #define getEstimatedAltitudeCm | ( | ) | bf_getEstimatedAltitudeCm() |
Definition at line 252 of file cc2500_compat.h.
| #define getEstimatedVario | ( | ) | bf_getEstimatedVario() |
Definition at line 255 of file cc2500_compat.h.
| #define getLegacyBatteryVoltage | ( | ) | bf_getLegacyBatteryVoltage() |
Definition at line 271 of file cc2500_compat.h.
| #define getMAhDrawn | ( | ) | bf_getMAhDrawn() |
Definition at line 283 of file cc2500_compat.h.
Definition at line 207 of file cc2500_compat.h.
| #define IOConfigGPIO | ( | io, | |
| cfg | |||
| ) | bf_IOConfigGPIO(io, cfg) |
Definition at line 221 of file cc2500_compat.h.
| #define IOGetByTag | ( | io | ) | bf_IOGetByTag(io) |
Definition at line 210 of file cc2500_compat.h.
Definition at line 213 of file cc2500_compat.h.
| #define IOToggle | ( | io | ) | bf_IOToggle(io) |
Definition at line 231 of file cc2500_compat.h.
| #define isAmperageConfigured | ( | ) | bf_isAmperageConfigured() |
Definition at line 279 of file cc2500_compat.h.
| #define isArmingDisabled | ( | ) | 0 |
Definition at line 235 of file cc2500_compat.h.
| #define isBatteryVoltageConfigured | ( | ) | bf_isBatteryVoltageConfigured() |
Definition at line 268 of file cc2500_compat.h.
Definition at line 174 of file cc2500_compat.h.
Definition at line 176 of file cc2500_compat.h.
Definition at line 100 of file cc2500_compat.h.
| #define PID_PITCH 0 |
Definition at line 120 of file cc2500_compat.h.
| #define PID_ROLL 0 |
Definition at line 119 of file cc2500_compat.h.
| #define PID_YAW 0 |
Definition at line 121 of file cc2500_compat.h.
| #define PPM_RCVR_TIMEOUT 0 |
Definition at line 193 of file cc2500_compat.h.
| #define RX_SPI_MAX_PAYLOAD_SIZE 35 |
Definition at line 186 of file cc2500_compat.h.
| #define rxSpiDeviceInit | ( | rxSpiConfig | ) | bf_rxSpiDeviceInit() |
Definition at line 189 of file cc2500_compat.h.
| #define sensors | ( | ... | ) | 1 |
Definition at line 68 of file cc2500_compat.h.
Definition at line 63 of file cc2500_compat.h.
Definition at line 64 of file cc2500_compat.h.
| #define TIMEUS_MAX UINT32_MAX |
Definition at line 94 of file cc2500_compat.h.
| #define USE_RX_FRSKY_SPI |
Definition at line 51 of file cc2500_compat.h.
| #define USE_RX_FRSKY_SPI_D |
Definition at line 59 of file cc2500_compat.h.
| #define USE_RX_FRSKY_SPI_TELEMETRY |
Definition at line 52 of file cc2500_compat.h.
| #define USE_RX_FRSKY_SPI_X |
Definition at line 55 of file cc2500_compat.h.
| #define USE_RX_SPI |
Definition at line 50 of file cc2500_compat.h.
| #define USE_TELEMETRY_SMARTPORT |
Definition at line 56 of file cc2500_compat.h.
Definition at line 197 of file cc2500_compat.h.
Definition at line 205 of file cc2500_compat.h.
Definition at line 206 of file cc2500_compat.h.
| typedef struct pt1Filter_s pt1Filter_t |
Definition at line 91 of file cc2500_compat.h.
Definition at line 92 of file cc2500_compat.h.
Definition at line 93 of file cc2500_compat.h.
| Enumerator | |
|---|---|
| FEATURE_RX_PPM | |
| FEATURE_RX_SERIAL | |
| FEATURE_TELEMETRY | |
| FEATURE_RX_PARALLEL_PWM | |
| FEATURE_RX_MSP | |
| FEATURE_RSSI_ADC | |
| FEATURE_RX_SPI | |
Definition at line 135 of file cc2500_compat.h.
| Enumerator | |
|---|---|
| IOCFG_OUT_PP | |
| IOCFG_IN_FLOATING | |
| IOCFG_IPU | |
Definition at line 215 of file cc2500_compat.h.
| Enumerator | |
|---|---|
| OWNER_RX_SPI_EXTI | |
| OWNER_RX_SPI_BIND | |
| OWNER_LED | |
Definition at line 259 of file cc2500_compat.h.
Definition at line 95 of file cc2500_compat.c.
References Electrical::current, electrical, and foo.
Definition at line 81 of file cc2500_compat.c.
References bf_delayMicroseconds(), and foo.
Here is the call graph for this function:Definition at line 77 of file cc2500_compat.c.
References foo, and sys_time_usleep().
Referenced by bf_delay().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 47 of file cc2500_compat.c.
References FEATURE_RX_SPI, FEATURE_TELEMETRY, and foo.
Definition at line 193 of file cc2500_compat.c.
References Electrical::current, and electrical.
Definition at line 185 of file cc2500_compat.c.
Definition at line 181 of file cc2500_compat.c.
References electrical, and Electrical::vsupply.
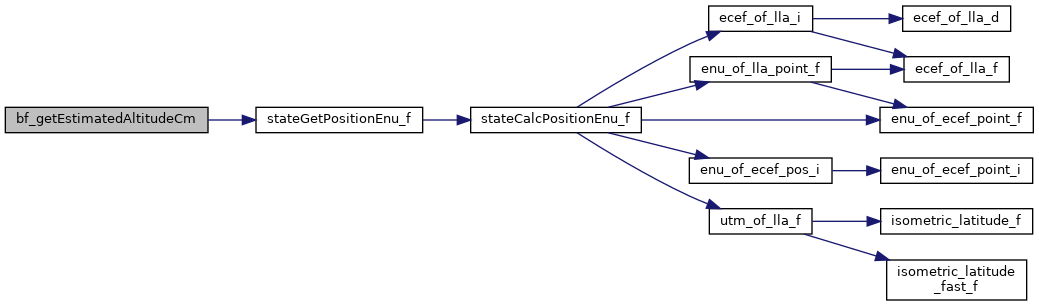
Definition at line 163 of file cc2500_compat.c.
References stateGetPositionEnu_f(), and EnuCoor_f::z.
Here is the call graph for this function:Definition at line 167 of file cc2500_compat.c.
References stateGetSpeedEnu_f(), and EnuCoor_f::z.
Here is the call graph for this function:Definition at line 177 of file cc2500_compat.c.
References electrical, and Electrical::vsupply.
Definition at line 197 of file cc2500_compat.c.
References Electrical::charge, and electrical.
| void bf_IOConfigGPIO | ( | IO_t | io, |
| enum ioconfig_t | cfg | ||
| ) |
Definition at line 119 of file cc2500_compat.c.
References foo, gpio_setup_input(), gpio_setup_input_pullup(), gpio_setup_output(), IOCFG_IN_FLOATING, IOCFG_IPU, and IOCFG_OUT_PP.
Here is the call graph for this function:Definition at line 109 of file cc2500_compat.c.
References foo.
Definition at line 142 of file cc2500_compat.c.
References foo.
Definition at line 113 of file cc2500_compat.c.
References foo.
Definition at line 147 of file cc2500_compat.c.
References foo.
Definition at line 137 of file cc2500_compat.c.
References foo, and gpio_get().
Here is the call graph for this function:Definition at line 152 of file cc2500_compat.c.
References foo, and gpio_toggle().
Here is the call graph for this function:Definition at line 189 of file cc2500_compat.c.
References TRUE.
Definition at line 173 of file cc2500_compat.c.
References TRUE.
Definition at line 85 of file cc2500_compat.c.
References get_sys_time_usec().
Here is the call graph for this function:Definition at line 89 of file cc2500_compat.c.
References get_sys_time_msec().
Here is the call graph for this function:Definition at line 103 of file cc2500_compat.c.
References TRUE.
|
inlinestatic |
Definition at line 96 of file cc2500_compat.h.
References b.
Referenced by frSkyXHandlePacket(), and processSmartPortTelemetry().
Here is the caller graph for this function:| float pt1FilterApply | ( | pt1Filter_t * | filter, |
| float | input | ||
| ) |
Definition at line 70 of file cc2500_compat.c.
References pt1Filter_s::k, and pt1Filter_s::state.
Referenced by setRssi().
Here is the caller graph for this function:Definition at line 55 of file cc2500_compat.c.
References foo, and M_PI_FLOAT.
Referenced by rxInit().
Here is the caller graph for this function:| void pt1FilterInit | ( | pt1Filter_t * | filter, |
| float | k | ||
| ) |
Definition at line 61 of file cc2500_compat.c.
References pt1Filter_s::k, and pt1Filter_s::state.
Referenced by rxInit().
Here is the caller graph for this function:| void pt1FilterUpdateCutoff | ( | pt1Filter_t * | filter, |
| float | k | ||
| ) |
Definition at line 66 of file cc2500_compat.c.
References pt1Filter_s::k.
|
extern |
Definition at line 39 of file cc2500_compat.c.
|
extern |
Definition at line 159 of file cc2500_compat.c.
Referenced by processSmartPortTelemetry().
|
extern |
Definition at line 43 of file cc2500_compat.c.
Referenced by processSmartPortTelemetry().