|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
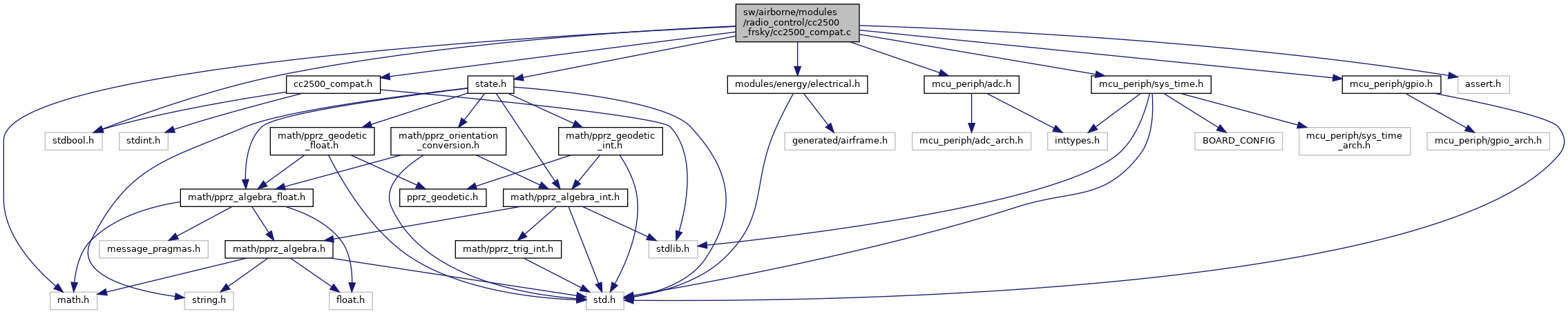
#include "cc2500_compat.h"#include "state.h"#include "mcu_periph/adc.h"#include "mcu_periph/gpio.h"#include "mcu_periph/sys_time.h"#include "modules/energy/electrical.h"#include <stdbool.h>#include <assert.h>#include <math.h> Include dependency graph for cc2500_compat.c:
Include dependency graph for cc2500_compat.c:Go to the source code of this file.
Macros | |
| #define | M_PI_FLOAT 3.14159265358979323846f |
Variables | |
| struct attitude_t | bf_attitude = { { 0, 0, 0 } } |
| struct pidProfile_s * | currentPidProfile |
| controlRateConfig_t * | currentControlRateProfile |
Definition at line 54 of file cc2500_compat.c.
Definition at line 95 of file cc2500_compat.c.
References Electrical::current, electrical, and foo.
Definition at line 81 of file cc2500_compat.c.
References bf_delayMicroseconds(), and foo.
Here is the call graph for this function:Definition at line 77 of file cc2500_compat.c.
References foo, and sys_time_usleep().
Referenced by bf_delay().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 47 of file cc2500_compat.c.
References FEATURE_RX_SPI, FEATURE_TELEMETRY, and foo.
Definition at line 193 of file cc2500_compat.c.
References Electrical::current, and electrical.
Definition at line 185 of file cc2500_compat.c.
Definition at line 181 of file cc2500_compat.c.
References electrical, and Electrical::vsupply.
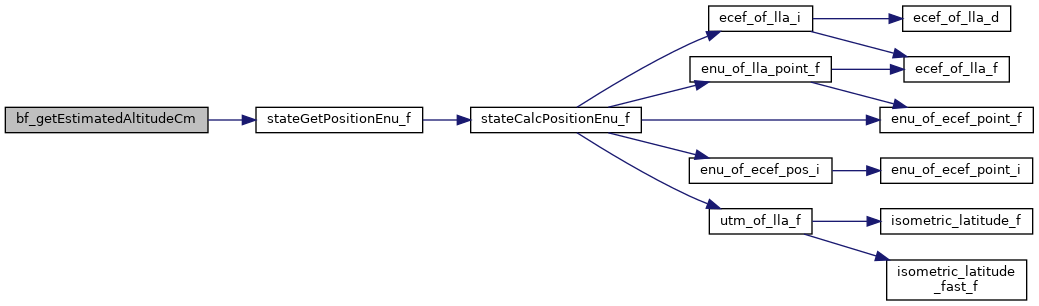
Definition at line 163 of file cc2500_compat.c.
References stateGetPositionEnu_f(), and EnuCoor_f::z.
Here is the call graph for this function:Definition at line 167 of file cc2500_compat.c.
References stateGetSpeedEnu_f(), and EnuCoor_f::z.
Here is the call graph for this function:Definition at line 177 of file cc2500_compat.c.
References electrical, and Electrical::vsupply.
Definition at line 197 of file cc2500_compat.c.
References Electrical::charge, and electrical.
| void bf_IOConfigGPIO | ( | IO_t | io, |
| enum ioconfig_t | cfg | ||
| ) |
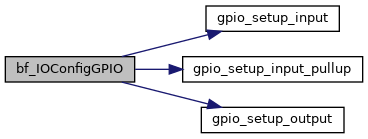
Definition at line 119 of file cc2500_compat.c.
References foo, gpio_setup_input(), gpio_setup_input_pullup(), gpio_setup_output(), IOCFG_IN_FLOATING, IOCFG_IPU, and IOCFG_OUT_PP.
Here is the call graph for this function:Definition at line 109 of file cc2500_compat.c.
References foo.
Definition at line 142 of file cc2500_compat.c.
References foo.
Definition at line 113 of file cc2500_compat.c.
References foo.
Definition at line 147 of file cc2500_compat.c.
References foo.
Definition at line 137 of file cc2500_compat.c.
References foo, and gpio_get().
Here is the call graph for this function:Definition at line 152 of file cc2500_compat.c.
References foo, and gpio_toggle().
Here is the call graph for this function:Definition at line 189 of file cc2500_compat.c.
References TRUE.
Definition at line 173 of file cc2500_compat.c.
References TRUE.
Definition at line 85 of file cc2500_compat.c.
References get_sys_time_usec().
Here is the call graph for this function:Definition at line 89 of file cc2500_compat.c.
References get_sys_time_msec().
Here is the call graph for this function:Definition at line 103 of file cc2500_compat.c.
References TRUE.
| float pt1FilterApply | ( | pt1Filter_t * | filter, |
| float | input | ||
| ) |
Definition at line 70 of file cc2500_compat.c.
References pt1Filter_s::k, and pt1Filter_s::state.
Referenced by setRssi().
Here is the caller graph for this function:Definition at line 55 of file cc2500_compat.c.
References foo, and M_PI_FLOAT.
Referenced by rxInit().
Here is the caller graph for this function:| void pt1FilterInit | ( | pt1Filter_t * | filter, |
| float | k | ||
| ) |
Definition at line 61 of file cc2500_compat.c.
References pt1Filter_s::k, and pt1Filter_s::state.
Referenced by rxInit().
Here is the caller graph for this function:| void pt1FilterUpdateCutoff | ( | pt1Filter_t * | filter, |
| float | k | ||
| ) |
Definition at line 66 of file cc2500_compat.c.
References pt1Filter_s::k.
| struct attitude_t bf_attitude = { { 0, 0, 0 } } |
Definition at line 39 of file cc2500_compat.c.
| controlRateConfig_t* currentControlRateProfile |
Definition at line 159 of file cc2500_compat.c.
Referenced by processSmartPortTelemetry().
| struct pidProfile_s* currentPidProfile |
Definition at line 43 of file cc2500_compat.c.
Referenced by processSmartPortTelemetry().