|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
A guidance mode based on Incremental Nonlinear Dynamic Inversion Come to ICRA2016 to learn more! More...
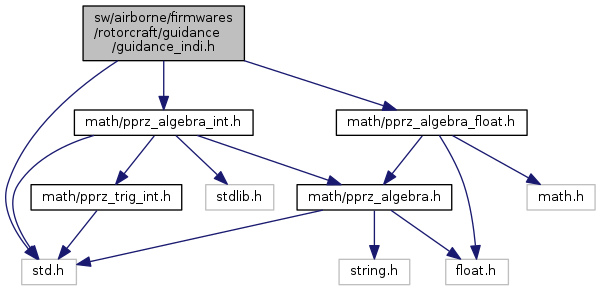
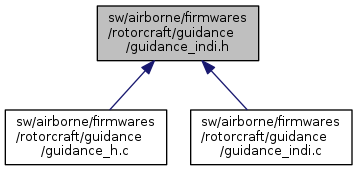
 Include dependency graph for guidance_indi.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for guidance_indi.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | guidance_indi_enter (void) |
| void | guidance_indi_run (bool_t in_flight, int32_t heading) |
| void | guidance_indi_filter_attitude (void) |
| void | guidance_indi_calcG (struct FloatMat33 *Gmat) |
| void | guidance_indi_filter_accel (void) |
| void | stabilization_attitude_set_setpoint_rp_quat_f (bool_t in_flight, int32_t heading) |
A guidance mode based on Incremental Nonlinear Dynamic Inversion Come to ICRA2016 to learn more!
Definition in file guidance_indi.h.
| void guidance_indi_calcG | ( | struct FloatMat33 * | Gmat | ) |
Definition at line 162 of file guidance_indi.c.
References FloatEulers::phi, FloatEulers::psi, RMAT_ELMT, stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_enter | ( | void | ) |
Definition at line 70 of file guidance_indi.c.
References filt_accel_ned, filt_accel_ned_d, filt_accel_ned_dd, filt_accelzbody, filt_accelzbodyd, filt_accelzbodydd, FLOAT_VECT3_ZERO, pitch_filt, pitch_filtd, pitch_filtdd, roll_filt, roll_filtd, and roll_filtdd.
Referenced by guidance_h_init(), and guidance_h_mode_changed().
Here is the caller graph for this function:| void guidance_indi_filter_accel | ( | void | ) |
Definition at line 134 of file guidance_indi.c.
References filt_accel_ned, filt_accel_ned_d, filt_accel_ned_dd, filter_omega, filter_zeta, PERIODIC_FREQUENCY, stateGetAccelNed_f(), VECT3_ADD_SCALED, FloatVect3::x, NedCoor_f::x, FloatVect3::y, NedCoor_f::y, FloatVect3::z, and NedCoor_f::z.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_filter_attitude | ( | void | ) |
Definition at line 148 of file guidance_indi.c.
References filter_omega, filter_zeta, PERIODIC_FREQUENCY, FloatEulers::phi, pitch_filt, pitch_filtd, pitch_filtdd, roll_filt, roll_filtd, roll_filtdd, stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_run | ( | bool_t | in_flight, |
| int32_t | heading | ||
| ) |
Definition at line 85 of file guidance_indi.c.
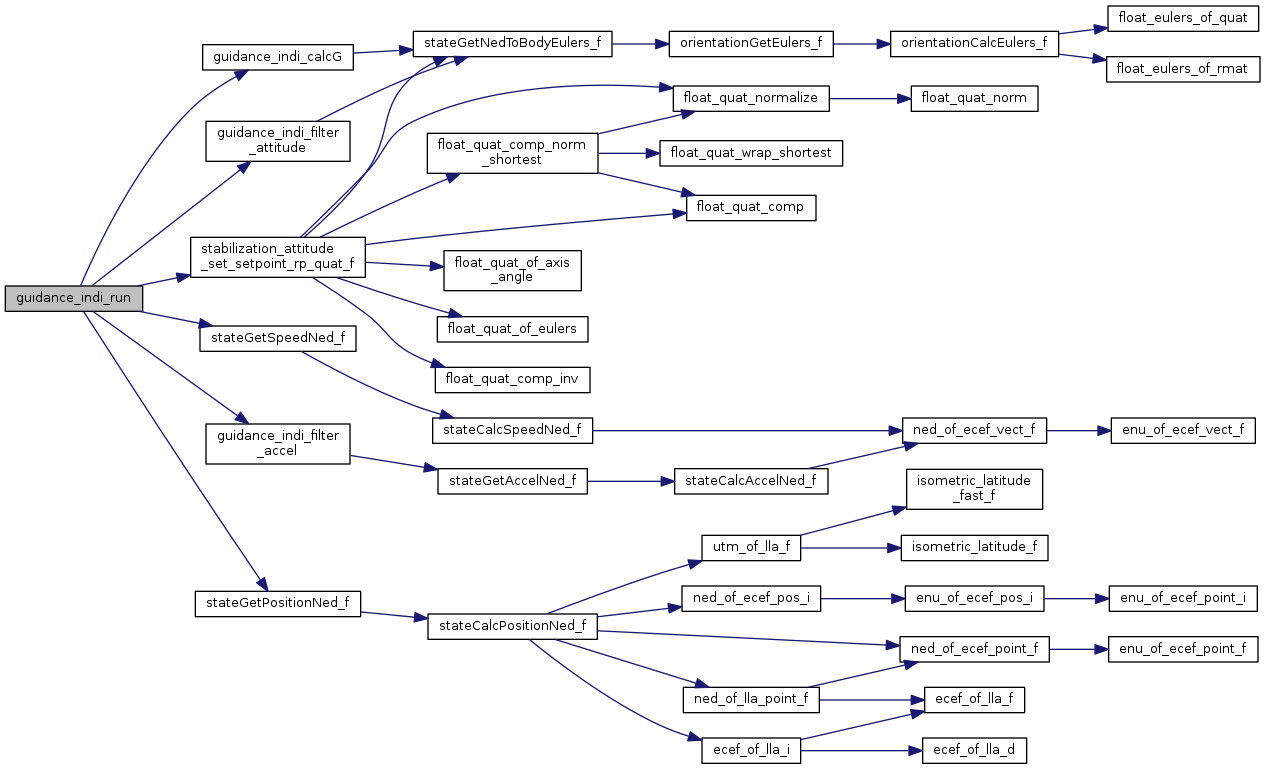
References euler_cmd, filt_accel_ned, Ga, Ga_inv, guidance_euler_cmd, guidance_h, GUIDANCE_H_MAX_BANK, guidance_indi_calcG(), guidance_indi_filter_accel(), guidance_indi_filter_attitude(), guidance_indi_pos_gain, guidance_indi_speed_gain, guidance_v_z_sp, MAT33_INV, MAT33_VECT3_MUL, FloatEulers::phi, pitch_filt, HorizontalGuidanceReference::pos, POS_FLOAT_OF_BFP, FloatEulers::psi, HorizontalGuidance::ref, roll_filt, stabilization_attitude_set_setpoint_rp_quat_f(), stateGetPositionNed_f(), stateGetSpeedNed_f(), FloatEulers::theta, FloatVect3::x, NedCoor_f::x, Int32Vect2::x, FloatVect3::y, NedCoor_f::y, Int32Vect2::y, FloatVect3::z, and NedCoor_f::z.
Referenced by guidance_h_run().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_set_setpoint_rp_quat_f | ( | bool_t | in_flight, |
| int32_t | heading | ||
| ) |
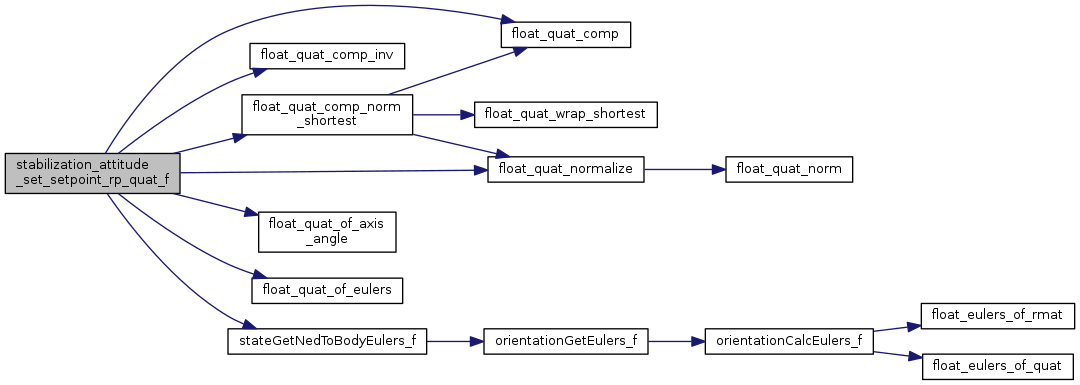
Definition at line 187 of file guidance_indi.c.
References ANGLE_FLOAT_OF_BFP, float_quat_comp(), float_quat_comp_inv(), float_quat_comp_norm_shortest(), float_quat_normalize(), float_quat_of_axis_angle(), float_quat_of_eulers(), guidance_euler_cmd, QUAT_BFP_OF_REAL, QUAT_COPY, stab_att_sp_quat, and stateGetNedToBodyEulers_f().
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.8
1.8.8