|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
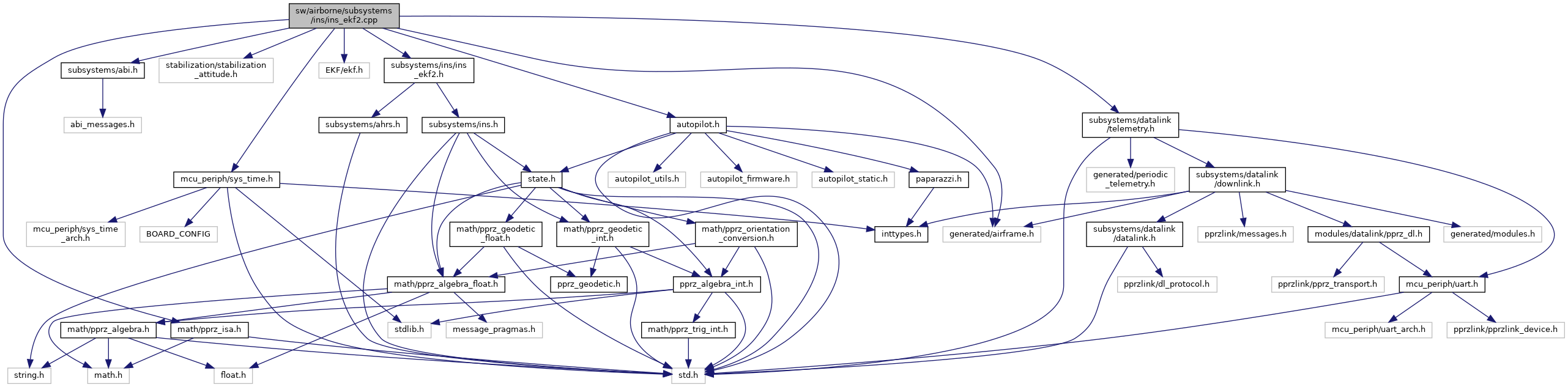
#include "subsystems/ins/ins_ekf2.h"#include "subsystems/abi.h"#include "stabilization/stabilization_attitude.h"#include "generated/airframe.h"#include "EKF/ekf.h"#include "math/pprz_isa.h"#include "mcu_periph/sys_time.h"#include "autopilot.h"#include "subsystems/datalink/telemetry.h" Include dependency graph for ins_ekf2.cpp:
Include dependency graph for ins_ekf2.cpp:Go to the source code of this file.
Data Structures | |
| struct | ekf2_t |
Macros | |
| #define | INS_EKF2_AGL_ID ABI_BROADCAST |
| For SITL and NPS we need special includes. More... | |
| #define | INS_SONAR_MIN_RANGE 0.001 |
| Default AGL sensor minimum range. More... | |
| #define | INS_SONAR_MAX_RANGE 4.0 |
| Default AGL sensor maximum range. More... | |
| #define | INS_EKF2_BARO_ID ABI_BROADCAST |
| default barometer to use in INS More... | |
| #define | INS_EKF2_GYRO_ID ABI_BROADCAST |
| #define | INS_EKF2_ACCEL_ID ABI_BROADCAST |
| #define | INS_EKF2_MAG_ID ABI_BROADCAST |
| #define | INS_EKF2_GPS_ID GPS_MULTI_ID |
Functions | |
| static void | agl_cb (uint8_t sender_id, uint32_t stamp, float distance) |
| static void | baro_cb (uint8_t sender_id, uint32_t stamp, float pressure) |
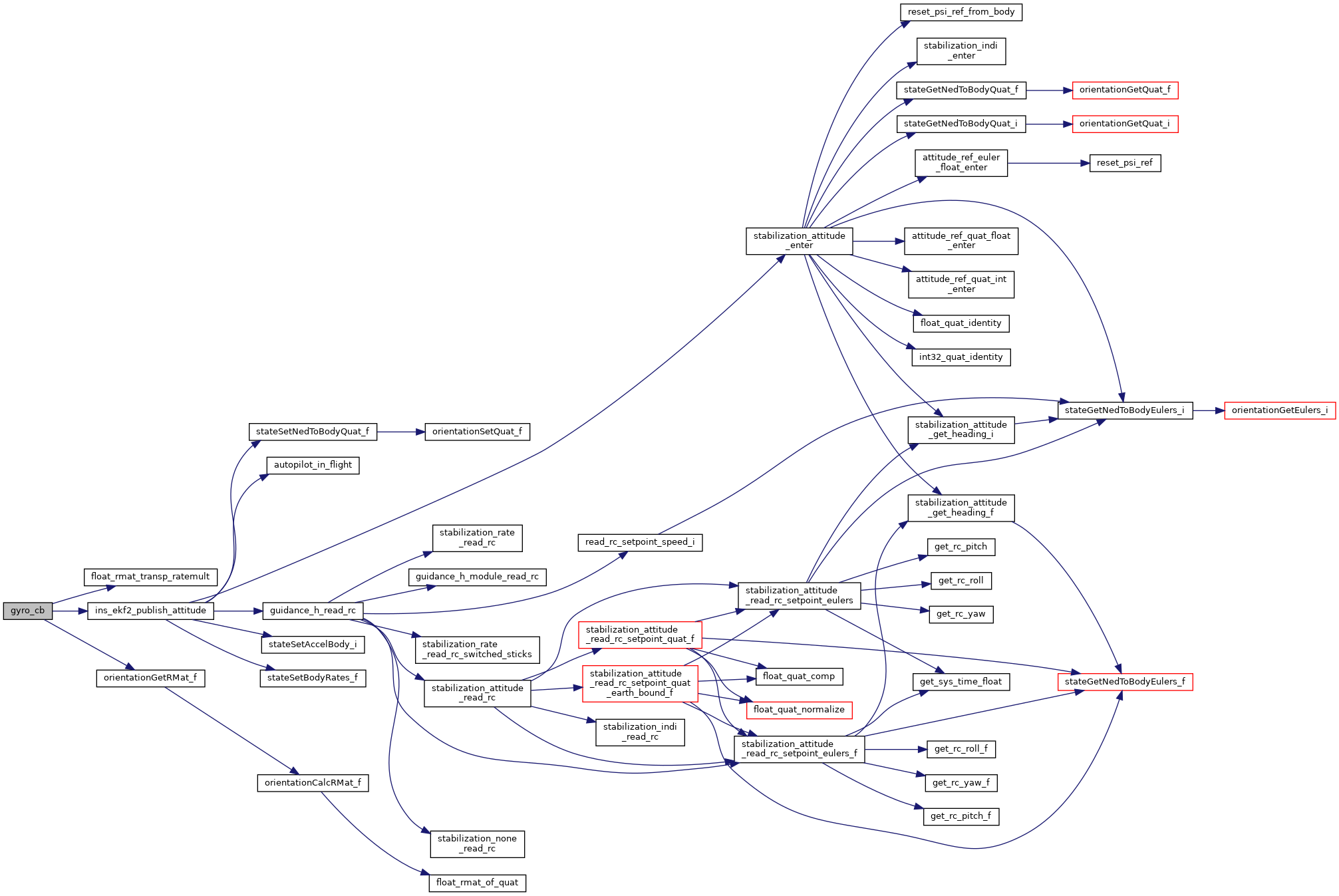
| static void | gyro_cb (uint8_t sender_id, uint32_t stamp, struct Int32Rates *gyro) |
| static void | accel_cb (uint8_t sender_id, uint32_t stamp, struct Int32Vect3 *accel) |
| static void | mag_cb (uint8_t sender_id, uint32_t stamp, struct Int32Vect3 *mag) |
| static void | gps_cb (uint8_t sender_id, uint32_t stamp, struct GpsState *gps_s) |
| static void | body_to_imu_cb (uint8_t sender_id, struct FloatQuat *q_b2i_f) |
| static void | ins_ekf2_publish_attitude (uint32_t stamp) |
| Publish the attitude and get the new state Directly called after a succeslfull gyro+accel reading. More... | |
| static void | send_ins_ref (struct transport_tx *trans, struct link_device *dev) |
| static void | send_ins_ekf2 (struct transport_tx *trans, struct link_device *dev) |
| static void | send_ins_ekf2_ext (struct transport_tx *trans, struct link_device *dev) |
| static void | send_filter_status (struct transport_tx *trans, struct link_device *dev) |
| static void | send_wind_info_ret (struct transport_tx *trans, struct link_device *dev) |
| static void | send_ahrs_bias (struct transport_tx *trans, struct link_device *dev) |
| void | ins_ekf2_init (void) |
| void | ins_ekf2_update (void) |
| void | ins_ekf2_change_param (int32_t unk) |
Variables | |
| static abi_event | agl_ev |
| static abi_event | baro_ev |
| static abi_event | gyro_ev |
| static abi_event | accel_ev |
| static abi_event | mag_ev |
| static abi_event | gps_ev |
| static abi_event | body_to_imu_ev |
| struct gps_message | gps_msg = {} |
| static Ekf | ekf |
| EKF class itself. More... | |
| static parameters * | ekf_params |
| The EKF parameters. More... | |
| struct ekf2_t | ekf2 |
| Local EKF2 status structure. More... | |
| static uint8_t | ahrs_ekf2_id = AHRS_COMP_ID_EKF2 |
| Component ID for EKF. More... | |
| struct ekf2_parameters_t | ekf2_params |
INS based in the EKF2 of PX4
Definition in file ins_ekf2.cpp.
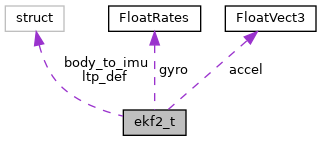
| struct ekf2_t |
Definition at line 121 of file ins_ekf2.cpp.
Collaboration diagram for ekf2_t:| Data Fields | ||
|---|---|---|
| FloatVect3 | accel | |
| uint32_t | accel_dt | |
| uint32_t | accel_stamp | |
| bool | accel_valid | |
| struct OrientationReps | body_to_imu | |
| bool | got_imu_data | |
| FloatRates | gyro | |
| uint32_t | gyro_dt | |
| uint32_t | gyro_stamp | |
| bool | gyro_valid | |
| struct LtpDef_i | ltp_def | |
| uint64_t | ltp_stamp | |
| uint8_t | quat_reset_counter | |
| #define INS_EKF2_ACCEL_ID ABI_BROADCAST |
Definition at line 85 of file ins_ekf2.cpp.
| #define INS_EKF2_AGL_ID ABI_BROADCAST |
For SITL and NPS we need special includes.
Prevent setting INS reference from flight plan default AGL sensor to use in INS
Definition at line 51 of file ins_ekf2.cpp.
| #define INS_EKF2_BARO_ID ABI_BROADCAST |
default barometer to use in INS
Definition at line 72 of file ins_ekf2.cpp.
| #define INS_EKF2_GPS_ID GPS_MULTI_ID |
Definition at line 97 of file ins_ekf2.cpp.
| #define INS_EKF2_GYRO_ID ABI_BROADCAST |
Definition at line 79 of file ins_ekf2.cpp.
| #define INS_EKF2_MAG_ID ABI_BROADCAST |
Definition at line 91 of file ins_ekf2.cpp.
| #define INS_SONAR_MAX_RANGE 4.0 |
Default AGL sensor maximum range.
Definition at line 63 of file ins_ekf2.cpp.
| #define INS_SONAR_MIN_RANGE 0.001 |
Default AGL sensor minimum range.
Definition at line 57 of file ins_ekf2.cpp.
|
static |
Definition at line 491 of file ins_ekf2.cpp.
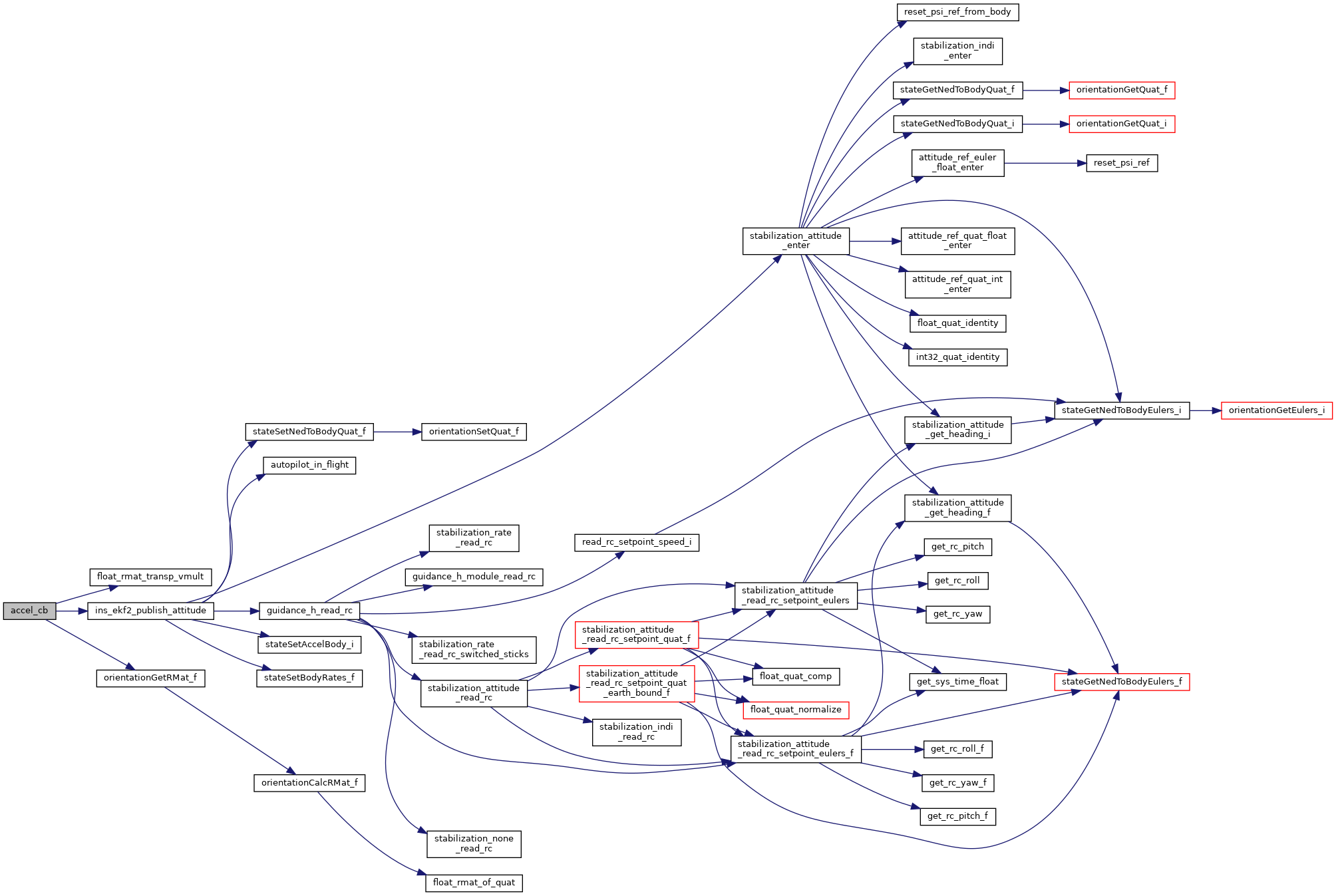
References ekf2_t::accel, ekf2_t::accel_dt, ekf2_t::accel_stamp, ekf2_t::accel_valid, ACCELS_FLOAT_OF_BFP, ekf2_t::body_to_imu, ekf2, float_rmat_transp_vmult(), ekf2_t::gyro_valid, ins_ekf2_publish_attitude(), and orientationGetRMat_f().
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 459 of file ins_ekf2.cpp.
References ekf.
Referenced by ins_ekf2_init().
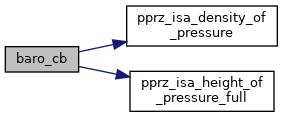
Here is the caller graph for this function:Definition at line 445 of file ins_ekf2.cpp.
References ekf, f, pprz_isa_density_of_pressure(), and pprz_isa_height_of_pressure_full().
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 570 of file ins_ekf2.cpp.
References ekf2_t::body_to_imu, ekf2, and orientationSetQuat_f().
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 544 of file ins_ekf2.cpp.
References ekf, GpsState::fix, gps_msg, GPS_VALID_VEL_NED_BIT, GpsState::gspeed, GpsState::hacc, GpsState::hmsl, LlaCoor_i::lat, GpsState::lla_pos, LlaCoor_i::lon, GpsState::ned_vel, GpsState::num_sv, GpsState::sacc, GpsState::vacc, GpsState::valid_fields, NedCoor_i::x, NedCoor_i::y, and NedCoor_i::z.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 465 of file ins_ekf2.cpp.
References ekf2_t::accel_valid, ekf2_t::body_to_imu, ekf2, float_rmat_transp_ratemult(), ekf2_t::gyro, ekf2_t::gyro_dt, ekf2_t::gyro_stamp, ekf2_t::gyro_valid, ins_ekf2_publish_attitude(), orientationGetRMat_f(), and RATES_FLOAT_OF_BFP.
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_ekf2_change_param | ( | int32_t | unk | ) |
Definition at line 364 of file ins_ekf2.cpp.
References ekf2_params, ekf_params, and ekf2_parameters_t::mag_fusion_type.
| void ins_ekf2_init | ( | void | ) |
Definition at line 248 of file ins_ekf2.cpp.
References ABI_BROADCAST, accel_cb(), accel_ev, ekf2_t::accel_stamp, ekf2_t::accel_valid, agl_cb(), agl_ev, baro_cb(), baro_ev, body_to_imu_cb(), body_to_imu_ev, DefaultPeriodic, ekf, ekf2, ekf_params, ekf2_t::got_imu_data, gps_cb(), gps_ev, gyro_cb(), gyro_ev, ekf2_t::gyro_stamp, ekf2_t::gyro_valid, INS_EKF2_ACCEL_ID, INS_EKF2_AGL_ID, INS_EKF2_BARO_ID, INS_EKF2_GPS_ID, INS_EKF2_GYRO_ID, INS_EKF2_MAG_ID, INS_SONAR_MAX_RANGE, INS_SONAR_MIN_RANGE, ekf2_t::ltp_stamp, mag_cb(), mag_ev, ekf2_t::quat_reset_counter, register_periodic_telemetry(), send_ahrs_bias(), send_filter_status(), send_ins_ekf2(), send_ins_ekf2_ext(), send_ins_ref(), and send_wind_info_ret().
Here is the call graph for this function:
|
static |
Publish the attitude and get the new state Directly called after a succeslfull gyro+accel reading.
Definition at line 371 of file ins_ekf2.cpp.
References ekf2_t::accel, ACCEL_BFP_OF_REAL, ekf2_t::accel_dt, ekf2_t::accel_valid, ANGLE_BFP_OF_REAL, autopilot_in_flight(), ekf, ekf2, f, ekf2_t::got_imu_data, guidance_h, guidance_h_read_rc(), ekf2_t::gyro, ekf2_t::gyro_dt, ekf2_t::gyro_valid, HorizontalGuidanceSetpoint::heading, nav_heading, FloatRates::p, FloatEulers::psi, FloatRates::q, FloatQuat::qi, ekf2_t::quat_reset_counter, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatRates::r, HorizontalGuidance::rc_sp, HorizontalGuidance::sp, stab_att_sp_euler, stabilization_attitude_enter(), stateSetAccelBody_i(), stateSetBodyRates_f(), stateSetNedToBodyQuat_f(), FloatVect3::x, Int32Vect3::x, FloatVect3::y, Int32Vect3::y, FloatVect3::z, and Int32Vect3::z.
Referenced by accel_cb(), and gyro_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ins_ekf2_update | ( | void | ) |
Definition at line 289 of file ins_ekf2.cpp.
References LlaCoor_i::alt, autopilot_in_flight(), ekf, ekf2, ekf2_t::got_imu_data, LlaCoor_i::lat, LlaCoor_i::lon, ekf2_t::ltp_def, ltp_def_from_lla_i(), ekf2_t::ltp_stamp, nps_bypass_ins, sim_overwrite_ins(), stateSetAccelNed_f(), stateSetLocalOrigin_i(), stateSetPositionNed_f(), stateSetSpeedNed_f(), NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Here is the call graph for this function:
|
static |
Definition at line 517 of file ins_ekf2.cpp.
References ekf2_t::body_to_imu, ekf, ekf2, float_rmat_transp_vmult(), ekf2_t::got_imu_data, MAGS_FLOAT_OF_BFP, orientationGetRMat_f(), FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 235 of file ins_ekf2.cpp.
References dev, ekf, and states.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 198 of file ins_ekf2.cpp.
References ahrs_ekf2_id, dev, and ekf.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 165 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 184 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 155 of file ins_ekf2.cpp.
References LlaCoor_i::alt, dev, LtpDef_i::ecef, ekf2, LtpDef_i::hmsl, LlaCoor_i::lat, LtpDef_i::lla, LlaCoor_i::lon, ekf2_t::ltp_def, ekf2_t::ltp_stamp, EcefCoor_i::x, EcefCoor_i::y, and EcefCoor_i::z.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 223 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 105 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 102 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Component ID for EKF.
Definition at line 147 of file ins_ekf2.cpp.
Referenced by send_filter_status().
|
static |
Definition at line 103 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 108 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
EKF class itself.
Definition at line 144 of file ins_ekf2.cpp.
Referenced by agl_cb(), baro_cb(), gps_cb(), ins_ekf2_init(), ins_ekf2_publish_attitude(), ins_ekf2_update(), mag_cb(), send_ahrs_bias(), send_filter_status(), send_ins_ekf2(), send_ins_ekf2_ext(), and send_wind_info_ret().
| struct ekf2_t ekf2 |
Local EKF2 status structure.
Definition at line 146 of file ins_ekf2.cpp.
Referenced by accel_cb(), body_to_imu_cb(), gyro_cb(), ins_ekf2_init(), ins_ekf2_publish_attitude(), ins_ekf2_update(), mag_cb(), and send_ins_ref().
| struct ekf2_parameters_t ekf2_params |
Definition at line 150 of file ins_ekf2.cpp.
Referenced by ins_ekf2_change_param().
|
static |
The EKF parameters.
Definition at line 145 of file ins_ekf2.cpp.
Referenced by ins_ekf2_change_param(), and ins_ekf2_init().
|
static |
Definition at line 107 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
| struct gps_message gps_msg = {} |
Definition at line 109 of file ins_ekf2.cpp.
Referenced by gps_cb().
|
static |
Definition at line 104 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 106 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
 1.8.17
1.8.17