|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
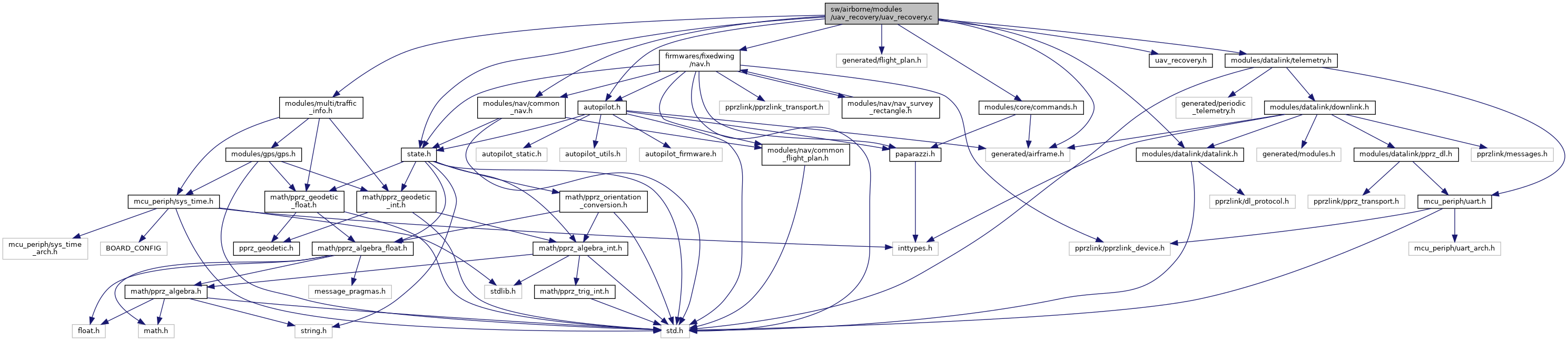
#include "autopilot.h"#include "state.h"#include "firmwares/fixedwing/nav.h"#include "modules/nav/common_nav.h"#include "generated/flight_plan.h"#include "generated/airframe.h"#include "modules/datalink/datalink.h"#include "modules/multi/traffic_info.h"#include "modules/core/commands.h"#include "uav_recovery.h"#include "modules/datalink/telemetry.h" Include dependency graph for uav_recovery.c:
Include dependency graph for uav_recovery.c:Go to the source code of this file.
Macros | |
| #define | PARACHUTE_TRIGGER_DELAY 2. |
| TERMINAL VELOCITY OF THE PARACHUTE PLUS PAYLOAD. | |
| #define | PARACHUTE_DESCENT_RATE 3.0 |
| #define | PARACHUTE_WIND_CORRECTION 1.0 |
| #define | PARACHUTE_LINE_LENGTH 3.0 |
Functions | |
| static void | send_wind_info (struct transport_tx *trans, struct link_device *dev) |
| void | uav_recovery_init (void) |
| void | uav_recovery_periodic (void) |
| uint8_t | LockParachute (void) |
| uint8_t | DeployParachute (void) |
| uint8_t | calculate_wind_no_airspeed (uint8_t wp, float radius, float height) |
| unit_t | parachute_compute_approach (uint8_t baseleg, uint8_t release, uint8_t wp_target) |
Variables | |
| float | parachute_start_qdr |
| float | parachute_z |
| float | airborne_wind_dir = 0 |
| float | airborne_wind_speed = 0 |
| float | calculated_wind_dir = 0 |
| bool | wind_measurements_valid = true |
| bool | wind_info_valid = false |
| bool | deploy_parachute_var = 0 |
| bool | land_direction = 0 |
| #define PARACHUTE_DESCENT_RATE 3.0 |
Definition at line 62 of file uav_recovery.c.
| #define PARACHUTE_LINE_LENGTH 3.0 |
Definition at line 68 of file uav_recovery.c.
| #define PARACHUTE_TRIGGER_DELAY 2. |
TERMINAL VELOCITY OF THE PARACHUTE PLUS PAYLOAD.
Definition at line 58 of file uav_recovery.c.
| #define PARACHUTE_WIND_CORRECTION 1.0 |
Definition at line 65 of file uav_recovery.c.
Definition at line 148 of file uav_recovery.c.
References airborne_wind_dir, airborne_wind_speed, calculated_wind_dir, foo, GetPosAlt, Height, init, MAX_PPRZ, nav_in_circle, NavCircleCount, NavCircleWaypoint, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, NavVerticalThrottleMode, stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), wind_info_valid, and wind_measurements_valid.
Here is the call graph for this function:Definition at line 139 of file uav_recovery.c.
References deploy_parachute_var.
Definition at line 131 of file uav_recovery.c.
References deploy_parachute_var.
Definition at line 235 of file uav_recovery.c.
References point::a, airborne_wind_speed, calculated_wind_dir, foo, ground_alt, nav_radius, PARACHUTE_DESCENT_RATE, PARACHUTE_LINE_LENGTH, parachute_start_qdr, PARACHUTE_WIND_CORRECTION, parachute_z, waypoints, point::x, and point::y.
|
static |
Definition at line 84 of file uav_recovery.c.
References airborne_wind_dir, airborne_wind_speed, dev, and foo.
Referenced by uav_recovery_init().
Here is the caller graph for this function:Definition at line 94 of file uav_recovery.c.
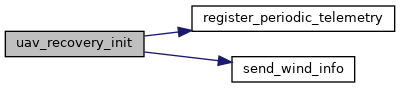
References airborne_wind_dir, airborne_wind_speed, DefaultPeriodic, deploy_parachute_var, foo, MIN_PPRZ, register_periodic_telemetry(), send_wind_info(), wind_info_valid, and wind_measurements_valid.
Here is the call graph for this function:Definition at line 115 of file uav_recovery.c.
References AP_MODE_MANUAL, autopilot, deploy_parachute_var, foo, MAX_PPRZ, MIN_PPRZ, and pprz_autopilot::mode.
| float airborne_wind_dir = 0 |
Definition at line 73 of file uav_recovery.c.
Referenced by calculate_wind_no_airspeed(), send_wind_info(), and uav_recovery_init().
| float airborne_wind_speed = 0 |
Definition at line 74 of file uav_recovery.c.
Referenced by calculate_wind_no_airspeed(), parachute_compute_approach(), send_wind_info(), and uav_recovery_init().
| float calculated_wind_dir = 0 |
Definition at line 75 of file uav_recovery.c.
Referenced by calculate_wind_no_airspeed(), and parachute_compute_approach().
| bool deploy_parachute_var = 0 |
Definition at line 78 of file uav_recovery.c.
Referenced by DeployParachute(), LockParachute(), uav_recovery_init(), and uav_recovery_periodic().
| bool land_direction = 0 |
Definition at line 79 of file uav_recovery.c.
| float parachute_start_qdr |
Definition at line 71 of file uav_recovery.c.
Referenced by parachute_compute_approach().
| float parachute_z |
Definition at line 72 of file uav_recovery.c.
Referenced by parachute_compute_approach().
Definition at line 77 of file uav_recovery.c.
Referenced by calculate_wind_no_airspeed(), and uav_recovery_init().
Definition at line 76 of file uav_recovery.c.
Referenced by calculate_wind_no_airspeed(), and uav_recovery_init().