|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
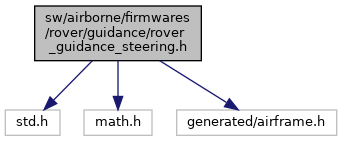
#include "std.h"#include <math.h>#include "math/pprz_geodetic_float.h"#include "generated/airframe.h" Include dependency graph for rover_guidance_steering.h: This graph shows which files directly or indirectly include this file:
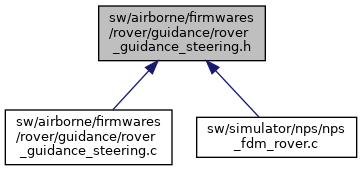
Include dependency graph for rover_guidance_steering.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | sr_cmd_t |
| Steering rover guidance STRUCTURES. More... | |
| struct | rover_ctrl |
Macros | |
| #define | MAX_DELTA 15.0 |
| Generated airframe.h from airframe.xml. | |
| #define | MIN_DELTA MAX_DELTA |
| #define | MAX_CMD_SHUT 0 |
| #define | MIN_CMD_SHUT 0 |
| #define | MAX_SPEED 999.0 |
| #define | MIN_SPEED 0.2 |
| #define | DRIVE_SHAFT_DISTANCE 0.25 |
| #define | SR_MEASURED_KF 10 |
| #define | BoundDelta(delta) |
| MACROS. | |
| #define | BoundSpeed(speed) |
| #define | BoundThrottle(throttle) TRIM_PPRZ((int)throttle) |
| #define | GetCmdFromDelta(delta) |
| #define | GetCmdFromThrottle(throttle) (autopilot_throttle_killed() ? 0 : TRIM_PPRZ((int)throttle)) |
| #define | SetAPThrottleFromCommands(void) |
Functions | |
| void | rover_guidance_steering_init (void) |
| Steering rover guidance EXT FUNCTIONS. | |
| void | rover_guidance_steering_periodic (void) |
| void | rover_guidance_steering_heading_ctrl (float omega) |
| CTRL functions. | |
| void | rover_guidance_steering_speed_ctrl (void) |
| void | rover_guidance_steering_setpoints (struct EnuCoor_f pos_sp, float *heading_sp) |
| void | rover_guidance_steering_pid_reset (void) |
| PID RESET function. | |
| void | rover_guidance_steering_kill (void) |
| void | rover_guidance_steering_set_speed_pgain (float pgain) |
| void | rover_guidance_steering_set_speed_igain (float igain) |
Variables | |
| rover_ctrl | guidance_control |
| struct sr_cmd_t |
Steering rover guidance STRUCTURES.
Definition at line 102 of file rover_guidance_steering.h.
| Data Fields | ||
|---|---|---|
| float | delta | |
| float | speed | |
| struct rover_ctrl |
| #define BoundDelta | ( | delta | ) |
MACROS.
Definition at line 138 of file rover_guidance_steering.h.
| #define BoundSpeed | ( | speed | ) |
Definition at line 143 of file rover_guidance_steering.h.
Definition at line 148 of file rover_guidance_steering.h.
| #define DRIVE_SHAFT_DISTANCE 0.25 |
Definition at line 89 of file rover_guidance_steering.h.
| #define GetCmdFromDelta | ( | delta | ) |
Definition at line 151 of file rover_guidance_steering.h.
| #define GetCmdFromThrottle | ( | throttle | ) | (autopilot_throttle_killed() ? 0 : TRIM_PPRZ((int)throttle)) |
Definition at line 155 of file rover_guidance_steering.h.
| #define MAX_CMD_SHUT 0 |
Definition at line 73 of file rover_guidance_steering.h.
| #define MAX_DELTA 15.0 |
Generated airframe.h from airframe.xml.
Definition at line 62 of file rover_guidance_steering.h.
| #define MAX_SPEED 999.0 |
Definition at line 81 of file rover_guidance_steering.h.
| #define MIN_CMD_SHUT 0 |
Definition at line 76 of file rover_guidance_steering.h.
Definition at line 65 of file rover_guidance_steering.h.
| #define MIN_SPEED 0.2 |
Definition at line 84 of file rover_guidance_steering.h.
Definition at line 158 of file rover_guidance_steering.h.
| #define SR_MEASURED_KF 10 |
Definition at line 95 of file rover_guidance_steering.h.
CTRL functions.
Definition at line 98 of file rover_guidance_steering.c.
References BoundDelta, BoundSpeed, rover_ctrl::cmd, sr_cmd_t::delta, DRIVE_SHAFT_DISTANCE, foo, guidance_control, and stateGetHorizontalSpeedNorm_f().
Here is the call graph for this function:Steering rover guidance EXT FUNCTIONS.
Steering rover guidance EXT FUNCTIONS.
Definition at line 71 of file rover_guidance_steering.c.
References rover_ctrl::cmd, sr_cmd_t::delta, foo, guidance_control, rover_ctrl::heading_kp, init_pid_f(), rover_ctrl::kf, rover_ctrl::ki, rover_ctrl::kp, MAX_PPRZ, rover_ctrl::pos_kp, ROVER_GUIDANCE_HEADING_KP, ROVER_GUIDANCE_POS_KP, ROVER_GUIDANCE_SPEED_KI, ROVER_GUIDANCE_SPEED_KP, rover_pid, sr_cmd_t::speed, rover_ctrl::speed_error, SR_MEASURED_KF, rover_ctrl::throttle, and time_step.
Here is the call graph for this function:Definition at line 156 of file rover_guidance_steering.c.
References rover_ctrl::cmd, sr_cmd_t::delta, guidance_control, and sr_cmd_t::speed.
Definition at line 90 of file rover_guidance_steering.c.
References foo.
PID RESET function.
Definition at line 151 of file rover_guidance_steering.c.
References reset_pid_f(), and rover_pid.
Here is the call graph for this function:Definition at line 168 of file rover_guidance_steering.c.
References guidance_control, rover_ctrl::ki, rover_ctrl::kp, rover_pid, set_gains_pid_f(), and PID_f::sum.
Here is the call graph for this function:Definition at line 162 of file rover_guidance_steering.c.
References guidance_control, rover_ctrl::ki, rover_ctrl::kp, rover_pid, and set_gains_pid_f().
Here is the call graph for this function:Definition at line 118 of file rover_guidance_steering.c.
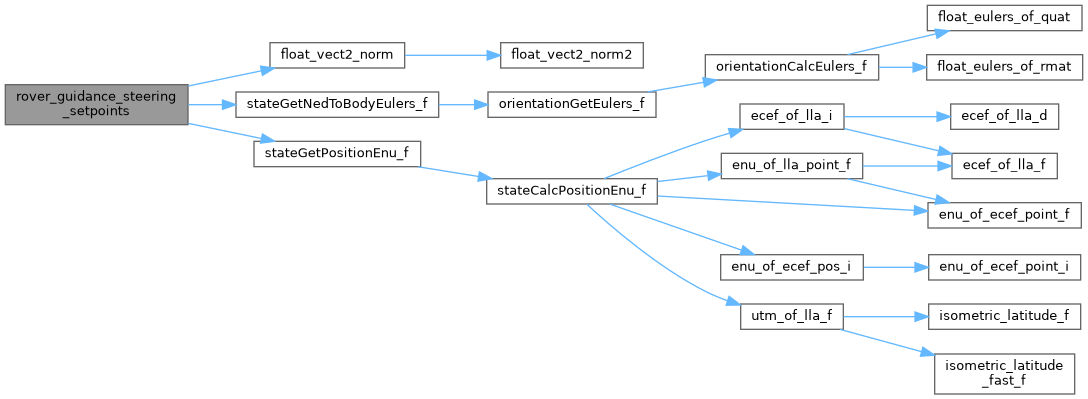
References rover_ctrl::cmd, float_vect2_norm(), foo, guidance_control, rover_ctrl::heading_kp, rover_ctrl::heading_sp, rover_ctrl::omega_sp, rover_ctrl::pos_kp, FloatEulers::psi, ROVER_GUIDANCE_MAX_POS_ERR, ROVER_GUIDANCE_MAX_SPEED, ROVER_GUIDANCE_PROXIMITY_DISTANCE, sr_cmd_t::speed, stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), VECT2_COPY, and VECT2_DIFF.
Here is the call graph for this function:Definition at line 109 of file rover_guidance_steering.c.
References BoundThrottle, rover_ctrl::cmd, get_pid_f(), guidance_control, rover_ctrl::kf, rover_pid, sr_cmd_t::speed, rover_ctrl::speed_error, stateGetHorizontalSpeedNorm_f(), rover_ctrl::throttle, time_step, and update_pid_f().
Here is the call graph for this function:
|
extern |
Definition at line 65 of file rover_guidance_steering.c.
Referenced by rover_guidance_steering_heading_ctrl(), rover_guidance_steering_init(), rover_guidance_steering_kill(), rover_guidance_steering_set_speed_igain(), rover_guidance_steering_set_speed_pgain(), rover_guidance_steering_setpoints(), and rover_guidance_steering_speed_ctrl().