|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
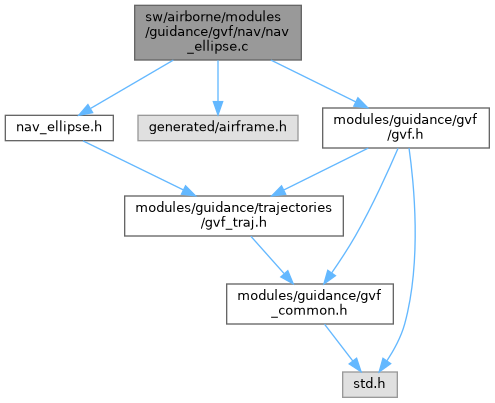
 Include dependency graph for nav_ellipse.c:
Include dependency graph for nav_ellipse.c:Go to the source code of this file.
Macros | |
| #define | GVF_ELLIPSE_KE 1 |
| #define | GVF_ELLIPSE_KN 1 |
| #define | GVF_ELLIPSE_A 80 |
| #define | GVF_ELLIPSE_B 80 |
| #define | GVF_ELLIPSE_ALPHA 0 |
Functions | |
| bool | nav_gvf_ellipse_XY (float x, float y, float a, float b, float alpha) |
| bool | nav_gvf_ellipse_wp (uint8_t wp, float a, float b, float alpha) |
Variables | |
| gvf_ell_par | gvf_ellipse_par |
| static int | gvf_p_len_wps = 0 |
| #define GVF_ELLIPSE_A 80 |
Default first axis for the ellipse trajectory
Definition at line 40 of file nav_ellipse.c.
| #define GVF_ELLIPSE_ALPHA 0 |
Default orientation in degrees for the ellipse trajectory
Definition at line 50 of file nav_ellipse.c.
| #define GVF_ELLIPSE_B 80 |
Default second axis for the ellipse trajectory
Definition at line 45 of file nav_ellipse.c.
| #define GVF_ELLIPSE_KE 1 |
Default gain ke for the ellipse trajectory
Definition at line 30 of file nav_ellipse.c.
| #define GVF_ELLIPSE_KN 1 |
Default gain kn for the ellipse trajectory
Definition at line 35 of file nav_ellipse.c.
Definition at line 103 of file nav_ellipse.c.
References alpha, b, gvf_p_len_wps, gvf_trajectory, nav_gvf_ellipse_XY(), gvf_tra::p, WaypointX, and WaypointY.
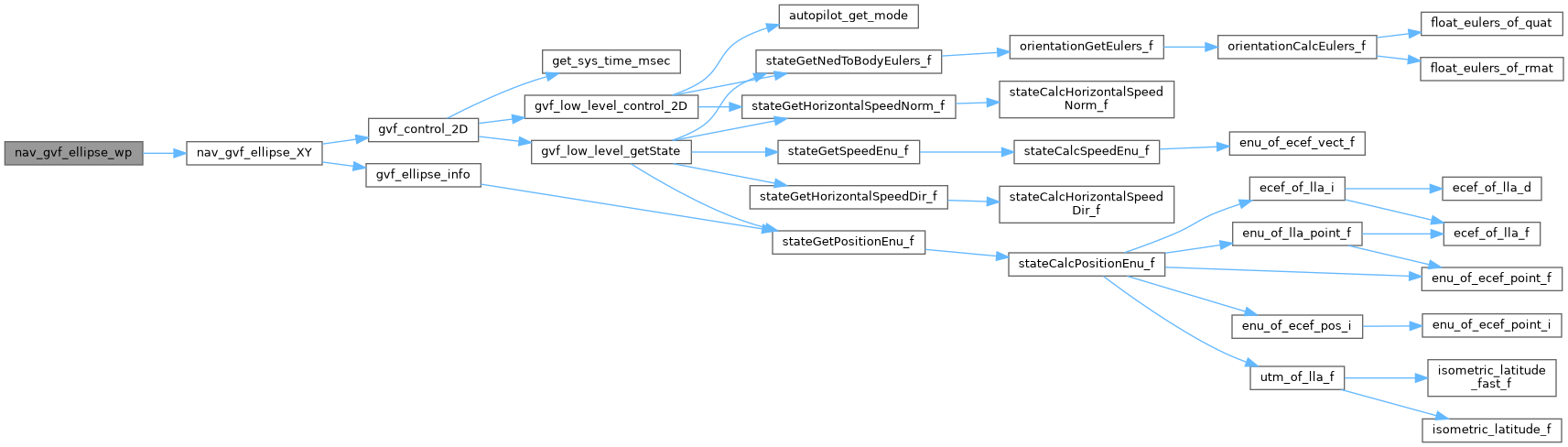
Here is the call graph for this function:Definition at line 64 of file nav_ellipse.c.
References alpha, b, gvf_con::error, foo, gvf_control, gvf_control_2D(), gvf_ellipse_info(), gvf_ellipse_par, gvf_p_len_wps, gvf_trajectory, gvf_con::ke, gvf_ell_par::ke, gvf_ell_par::kn, gvf_tra::p, gvf_tra::p_len, and gvf_tra::type.
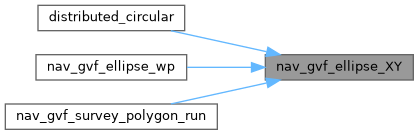
Referenced by distributed_circular(), nav_gvf_ellipse_wp(), and nav_gvf_survey_polygon_run().
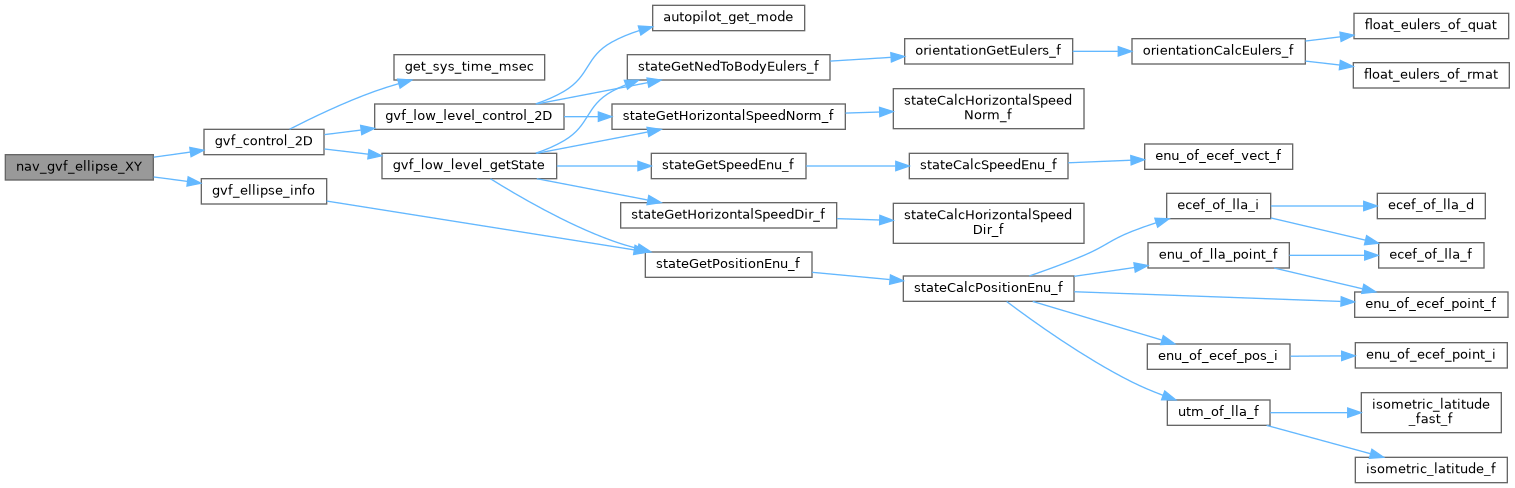
Here is the call graph for this function: Here is the caller graph for this function:| gvf_ell_par gvf_ellipse_par |
|
static |
Definition at line 58 of file nav_ellipse.c.
Referenced by nav_gvf_ellipse_wp(), nav_gvf_ellipse_XY(), nav_gvf_ik_ellipse_wp(), and nav_gvf_ik_ellipse_XY().