|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
mission navigation for rotorcrafts More...
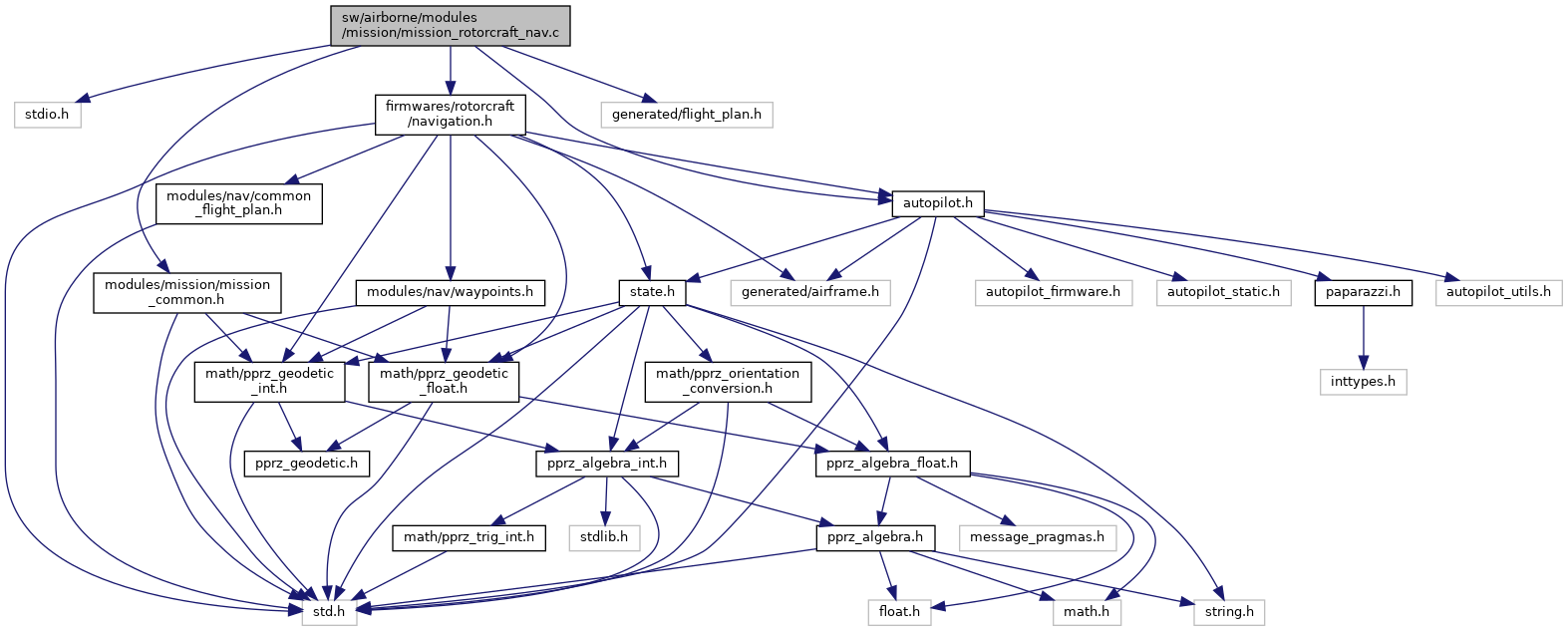
#include <stdio.h>#include "modules/mission/mission_common.h"#include "autopilot.h"#include "firmwares/rotorcraft/navigation.h"#include "generated/flight_plan.h" Include dependency graph for mission_rotorcraft_nav.c:
Include dependency graph for mission_rotorcraft_nav.c:Go to the source code of this file.
Macros | |
| #define | BUFFER_ZONE_DIST 10 |
| #define | MISSION_PATH_SKIP_GOTO FALSE |
| #define | MISSION_WAIT_TIMEOUT 30 |
| Implement waiting pattern Only called when MISSION_WAIT_TIMEOUT is not 0. | |
Functions | |
| bool | mission_point_of_lla (struct EnuCoor_f *point, struct LlaCoor_i *lla) |
| Utility function: converts lla (int) to local point (float) | |
| static bool | mission_nav_wp (struct _mission_element *el) |
| Navigation function to a single waypoint. | |
| static bool | mission_nav_circle (struct _mission_element *el) |
| Navigation function on a circle. | |
| static bool | mission_nav_segment (struct _mission_element *el) |
| Navigation function along a segment. | |
| static bool | mission_nav_path (struct _mission_element *el) |
| Navigation function along a path. | |
| static bool | mission_nav_custom (struct _mission_custom *custom, bool init) |
| Call custom navigation function. | |
| static bool | mission_wait_pattern (void) |
| int | mission_run () |
| Run mission. | |
Variables | |
| static const float | dt_navigation = 1.0f / ((float)NAVIGATION_FREQUENCY) |
| struct EnuCoor_f | last_mission_wp = { 0.f, 0.f, 0.f } |
| static bool | mission_wait_started = false |
mission navigation for rotorcrafts
Implement specific navigation routines for the mission control of a rotorcraft
Definition in file mission_rotorcraft_nav.c.
| #define BUFFER_ZONE_DIST 10 |
Definition at line 38 of file mission_rotorcraft_nav.c.
Definition at line 160 of file mission_rotorcraft_nav.c.
| #define MISSION_WAIT_TIMEOUT 30 |
Implement waiting pattern Only called when MISSION_WAIT_TIMEOUT is not 0.
Definition at line 219 of file mission_rotorcraft_nav.c.
|
inlinestatic |
Navigation function on a circle.
Definition at line 113 of file mission_rotorcraft_nav.c.
References _mission::element_time, foo, mission, nav, RotorcraftNavigation::nav_circle, NavVerticalAltitudeMode, and NavVerticalAutoThrottleMode.
Referenced by mission_run().
Here is the caller graph for this function:
|
inlinestatic |
Call custom navigation function.
Definition at line 206 of file mission_rotorcraft_nav.c.
References foo, init, MissionInit, and MissionRun.
Referenced by mission_run().
Here is the caller graph for this function:
|
inlinestatic |
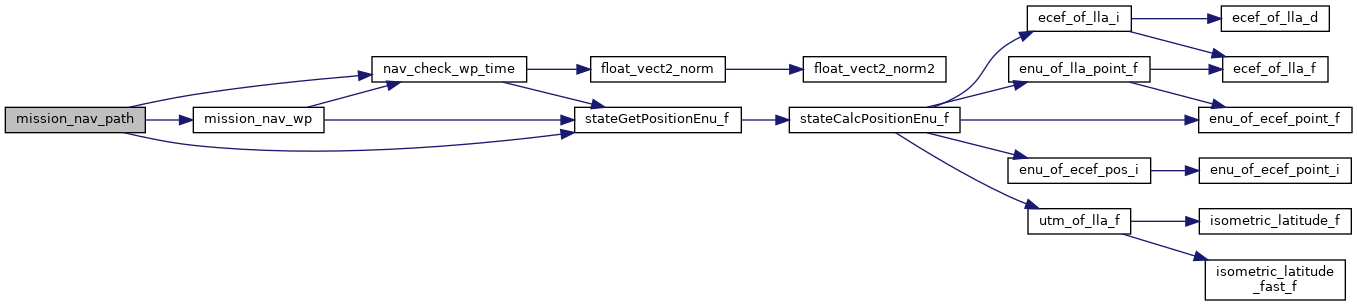
Navigation function along a path.
Definition at line 165 of file mission_rotorcraft_nav.c.
References CARROT, foo, last_mission_wp, mission_nav_wp(), MISSION_PATH_SKIP_GOTO, nav, RotorcraftNavigation::nav_approaching, nav_check_wp_time(), RotorcraftNavigation::nav_route, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, stateGetPositionEnu_f(), and EnuCoor_f::z.
Referenced by mission_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
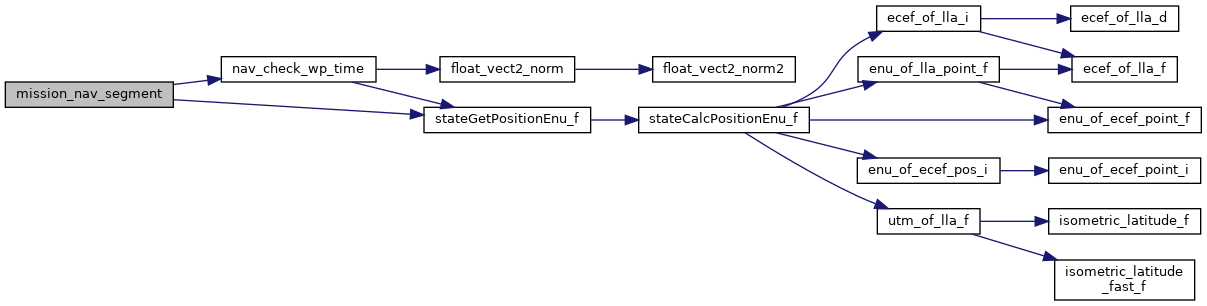
Navigation function along a segment.
Definition at line 132 of file mission_rotorcraft_nav.c.
References CARROT, foo, last_mission_wp, nav, RotorcraftNavigation::nav_approaching, nav_check_wp_time(), RotorcraftNavigation::nav_route, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, stateGetPositionEnu_f(), and EnuCoor_f::z.
Referenced by mission_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
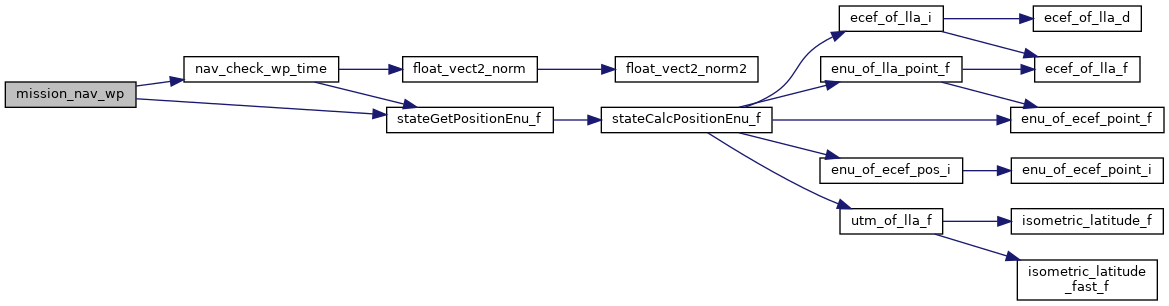
Navigation function to a single waypoint.
Definition at line 86 of file mission_rotorcraft_nav.c.
References CARROT, foo, last_mission_wp, nav, RotorcraftNavigation::nav_approaching, nav_check_wp_time(), RotorcraftNavigation::nav_goto, NavVerticalAltitudeMode, NavVerticalAutoThrottleMode, stateGetPositionEnu_f(), and EnuCoor_f::z.
Referenced by mission_nav_path(), and mission_run().
Here is the call graph for this function: Here is the caller graph for this function:Utility function: converts lla (int) to local point (float)
Get the ENU component of LLA mission point This function is firmware specific.
TODO: don't convert to float, either use double or do completely in fixed point
Definition at line 41 of file mission_rotorcraft_nav.c.
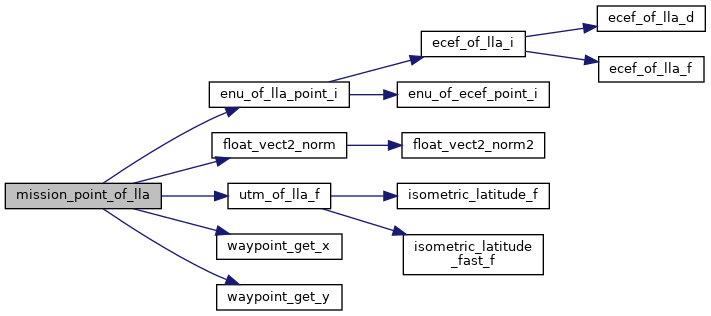
References LlaCoor_i::alt, BUFFER_ZONE_DIST, enu_of_lla_point_i(), float_vect2_norm(), foo, State::ned_initialized_i, state, stateGetHmslOrigin_i(), stateGetLlaOrigin_i(), stateGetNedOrigin_i(), VECT2_DIFF, VECT2_SMUL, VECT2_SUM, VECT3_SMUL, waypoint_get_x(), waypoint_get_y(), FloatVect2::x, and FloatVect2::y.
Here is the call graph for this function:Run mission.
This function should be implemented into a dedicated file since navigation functions are different for different firmwares
Currently, this function should be called from the flight plan
Definition at line 242 of file mission_rotorcraft_nav.c.
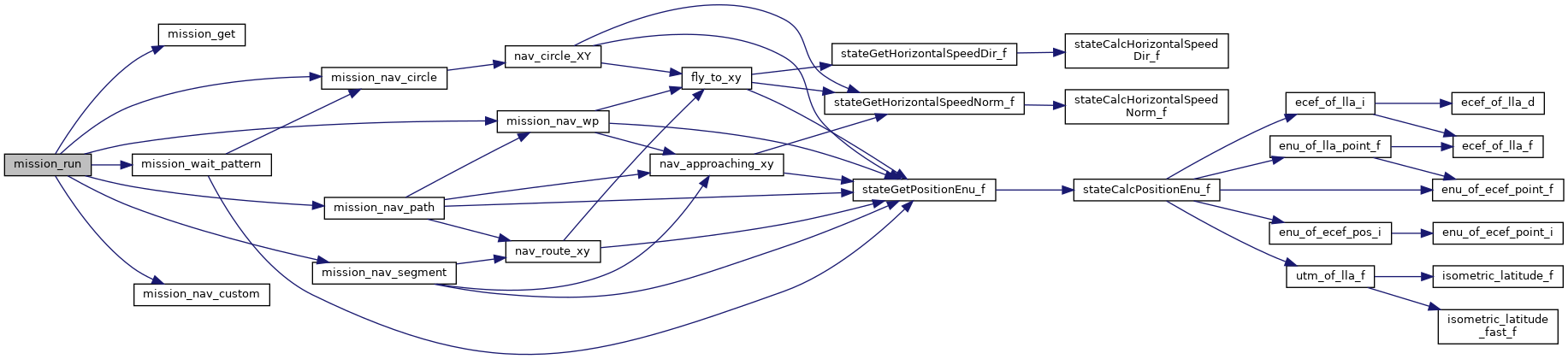
References _mission::current_idx, dt_navigation, _mission::element_time, foo, mission, MISSION_ELEMENT_NB, mission_get(), mission_nav_circle(), mission_nav_custom(), mission_nav_path(), mission_nav_segment(), mission_nav_wp(), mission_wait_pattern(), mission_wait_started, MissionCircle, MissionCustom, MissionPath, MissionSegment, and MissionWP.
Here is the call graph for this function:Definition at line 237 of file mission_rotorcraft_nav.c.
Referenced by mission_run().
Here is the caller graph for this function:
|
static |
Definition at line 79 of file mission_rotorcraft_nav.c.
Referenced by mission_run().
Definition at line 82 of file mission_rotorcraft_nav.c.
Referenced by mission_nav_path(), mission_nav_segment(), and mission_nav_wp().
Definition at line 222 of file mission_rotorcraft_nav.c.
Referenced by mission_run().