|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Fully actuated plateform can be achieve with hexa-copter with tilted propellers for example. More...
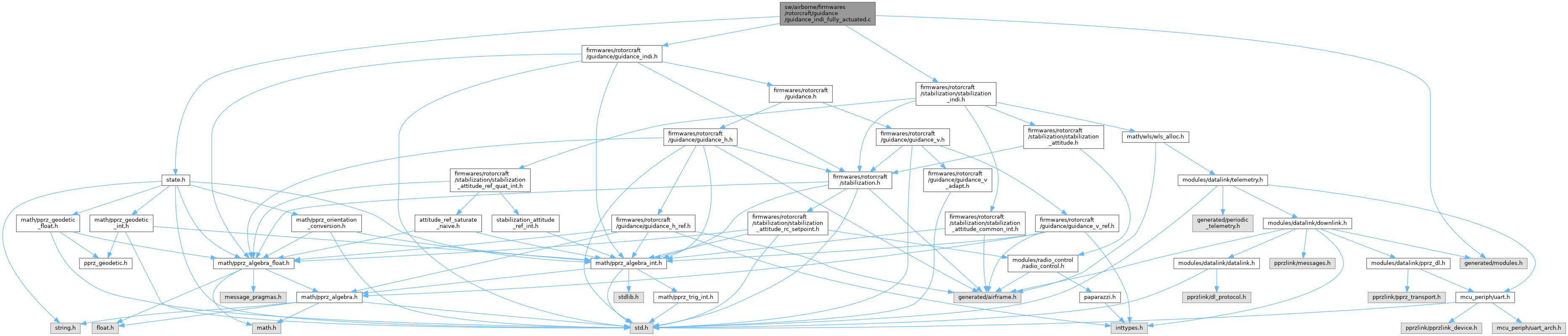
#include "firmwares/rotorcraft/guidance/guidance_indi.h"#include "firmwares/rotorcraft/stabilization/stabilization_indi.h"#include "state.h"#include "generated/modules.h" Include dependency graph for guidance_indi_fully_actuated.c:
Include dependency graph for guidance_indi_fully_actuated.c:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_INDI_MAX_H_THRUST 2.f |
| #define | GUIDANCE_INDI_MAX_V_THRUST 15.f |
Functions | |
| void | guidance_indi_calcG (float Gmat[3][6], const struct FloatQuat *att) |
| void | guidance_indi_set_wls_settings (struct WLS_t *wls, const struct FloatQuat *att, const float heading_sp) |
| struct ThrustSetpoint | guidance_set_rc_h_thrust (struct ThrustSetpoint *v_sp) |
| Set horizontal thrust from RC Horizontal is passed as an argument. | |
| struct StabilizationSetpoint | guidance_set_rc_h_att (struct StabilizationSetpoint *a_sp) |
| Set flat attitude setpoint from RC Heading setpoint is kept. | |
Variables | |
| float | guidance_indi_max_h_thrust = GUIDANCE_INDI_MAX_H_THRUST |
| float | guidance_indi_max_v_thrust = GUIDANCE_INDI_MAX_V_THRUST |
Fully actuated plateform can be achieve with hexa-copter with tilted propellers for example.
M. Hachem, C. Roos, T. Miquel and M. Bronz, "Full Pose Tracking via Robust Control for Over-Actuated Multirotors," 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025, pp. 5031-5038, doi: 10.1109/IROS60139.2025.11246553.
Definition in file guidance_indi_fully_actuated.c.
Definition at line 41 of file guidance_indi_fully_actuated.c.
Definition at line 45 of file guidance_indi_fully_actuated.c.
| Gmat | array to write the matrix to [3x6] |
Calculate the matrix of partial derivatives of the pitch, roll and thrust. w.r.t. the NED accelerations for YXZ eulers ddx = G*[dphi,dtheta,dpsi,dTx,dTy,dTz]
Definition at line 58 of file guidance_indi_fully_actuated.c.
References float_eulers_of_quat_yxz(), foo, Gmat, stab_thrust_filt, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Here is the call graph for this function:| void guidance_indi_set_wls_settings | ( | struct WLS_t * | wls, |
| const struct FloatQuat * | att, | ||
| const float | heading_sp | ||
| ) |
Definition at line 106 of file guidance_indi_fully_actuated.c.
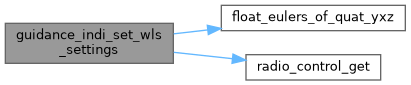
References float_eulers_of_quat_yxz(), foo, guidance_indi_max_bank, guidance_indi_max_h_thrust, guidance_indi_max_v_thrust, MAX_PPRZ, FloatEulers::phi, radio_control_get(), RADIO_PITCH, RADIO_ROLL, stab_thrust_filt, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| struct StabilizationSetpoint guidance_set_rc_h_att | ( | struct StabilizationSetpoint * | a_sp | ) |
Set flat attitude setpoint from RC Heading setpoint is kept.
Definition at line 152 of file guidance_indi_fully_actuated.c.
References foo, FloatEulers::phi, stab_sp_from_eulers_f(), stab_sp_to_eulers_f(), and FloatEulers::theta.
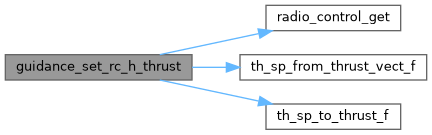
Here is the call graph for this function:| struct ThrustSetpoint guidance_set_rc_h_thrust | ( | struct ThrustSetpoint * | v_sp | ) |
Set horizontal thrust from RC Horizontal is passed as an argument.
Definition at line 143 of file guidance_indi_fully_actuated.c.
References foo, MAX_PPRZ, radio_control_get(), RADIO_PITCH, RADIO_ROLL, th_sp_from_thrust_vect_f(), th_sp_to_thrust_f(), and THRUST_AXIS_Z.
Here is the call graph for this function:| float guidance_indi_max_h_thrust = GUIDANCE_INDI_MAX_H_THRUST |
Definition at line 48 of file guidance_indi_fully_actuated.c.
Referenced by guidance_indi_set_wls_settings().
| float guidance_indi_max_v_thrust = GUIDANCE_INDI_MAX_V_THRUST |
Definition at line 49 of file guidance_indi_fully_actuated.c.
Referenced by guidance_indi_set_wls_settings().