|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
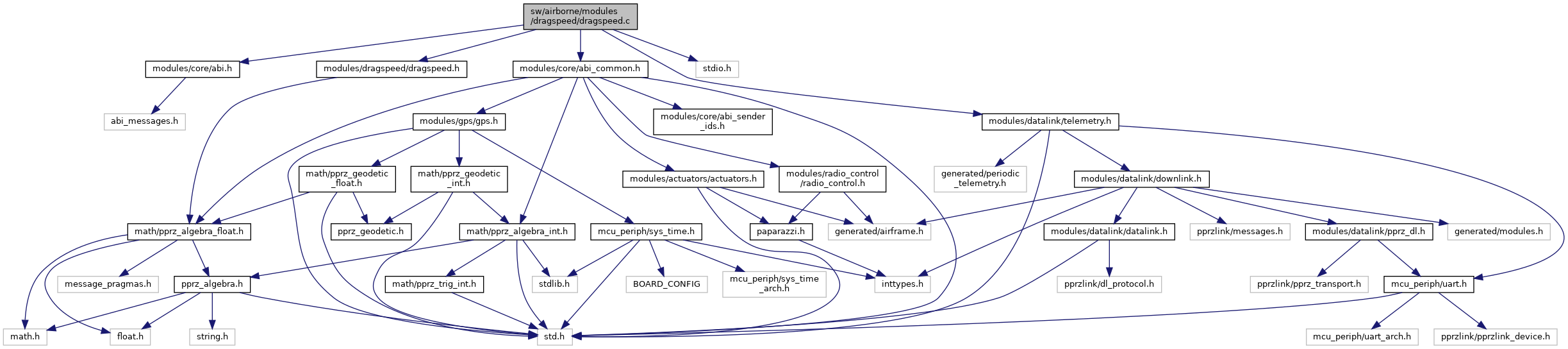
#include "modules/dragspeed/dragspeed.h"#include "modules/core/abi.h"#include "modules/core/abi_common.h"#include "modules/datalink/telemetry.h"#include <stdio.h> Include dependency graph for dragspeed.c:
Include dependency graph for dragspeed.c:Go to the source code of this file.
Macros | |
| #define | DRAGSPEED_SEND_ABI_MESSAGE TRUE |
| #define | DRAGSPEED_ACCEL_ID ABI_BROADCAST |
| #define | DRAGSPEED_COEFF_X 1.0 |
| #define | DRAGSPEED_COEFF_Y 1.0 |
| #define | DRAGSPEED_R 0.25 |
| #define | DRAGSPEED_FILTER 0.8 |
Functions | |
| static void | accel_cb (uint8_t sender_id, uint32_t stamp, struct Int32Vect3 *accel) |
| static void | send_dragspeed (struct transport_tx *trans, struct link_device *dev) |
| static void | calibrate_coeff (struct Int32Vect3 *accel) |
| Calibrate drag coefficient by comparing accelerometer measurements to INS velocities. | |
| static void | calibrate_zero (struct Int32Vect3 *accel) |
| Calibrate zero velocity by measuring the accelerations while the drone hovers in-place. | |
| void | dragspeed_init (void) |
| bool | dragspeed_calibrate_coeff (void) |
| bool | dragspeed_calibrate_zero (void) |
| bool | dragspeed_is_calibrating (void) |
Variables | |
| struct dragspeed_t | dragspeed |
| static abi_event | accel_ev |
During flight, gravity, thrust and drag act on the quadrotor. Only the drag is measured along the quadrotor's horizontal axes. Using a simple linear drag model, this deceleration can be transformed back into an estimate of the drone's airspeed.
This module makes the following assumptions:
Definition in file dragspeed.c.
| #define DRAGSPEED_ACCEL_ID ABI_BROADCAST |
Definition at line 52 of file dragspeed.c.
| #define DRAGSPEED_COEFF_X 1.0 |
Definition at line 56 of file dragspeed.c.
| #define DRAGSPEED_COEFF_Y 1.0 |
Definition at line 60 of file dragspeed.c.
| #define DRAGSPEED_FILTER 0.8 |
Definition at line 68 of file dragspeed.c.
| #define DRAGSPEED_R 0.25 |
Definition at line 64 of file dragspeed.c.
Definition at line 48 of file dragspeed.c.
|
static |
Definition at line 122 of file dragspeed.c.
References ACCEL_FLOAT_OF_BFP, calibrate_coeff(), dragspeed_t::calibrate_coeff, calibrate_zero(), dragspeed_t::calibrate_zero, dragspeed_t::coeff, dragspeed, DRAGSPEED_R, dragspeed_t::filter, foo, dragspeed_t::vel, VEL_DRAGSPEED_ID, FloatVect2::x, Int32Vect3::x, FloatVect2::y, Int32Vect3::y, and dragspeed_t::zero.
Referenced by dragspeed_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Calibrate drag coefficient by comparing accelerometer measurements to INS velocities.
Should be performed with VEL_DRAGSPEED_ID set to ABI_DISABLE, but for safety the ABI messages are also disabled automatically when calibration is active.
This routine requires the accelerometers to have been zeroed beforehand, otherwise it will return without changing the drag coefficient!
Definition at line 154 of file dragspeed.c.
References ACCEL_FLOAT_OF_BFP, dragspeed_t::calibrate_coeff, dragspeed_t::coeff, dragspeed, FALSE, foo, FloatEulers::psi, stateGetNedToBodyEulers_f(), stateGetSpeedEnu_f(), FloatVect2::x, Int32Vect3::x, FloatVect2::y, Int32Vect3::y, dragspeed_t::zero, and dragspeed_t::zero_calibrated.
Referenced by accel_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Calibrate zero velocity by measuring the accelerations while the drone hovers in-place.
The zero-velocity readings can change between flights, e.g. because of small differences in battery or outer hull positions.
Definition at line 216 of file dragspeed.c.
References ACCEL_FLOAT_OF_BFP, dragspeed_t::calibrate_zero, dragspeed, FALSE, foo, stateGetSpeedEnu_f(), TRUE, FloatVect2::x, Int32Vect3::x, FloatVect2::y, Int32Vect3::y, dragspeed_t::zero, and dragspeed_t::zero_calibrated.
Referenced by accel_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 105 of file dragspeed.c.
References dragspeed_t::calibrate_coeff, dragspeed, FALSE, and TRUE.
Definition at line 111 of file dragspeed.c.
References dragspeed_t::calibrate_zero, dragspeed, FALSE, and TRUE.
Definition at line 82 of file dragspeed.c.
References accel_cb(), accel_ev, dragspeed_t::coeff, DefaultPeriodic, dragspeed, DRAGSPEED_ACCEL_ID, DRAGSPEED_COEFF_X, DRAGSPEED_COEFF_Y, DRAGSPEED_FILTER, FALSE, dragspeed_t::filter, foo, register_periodic_telemetry(), send_dragspeed(), TRUE, FloatVect2::x, FloatVect2::y, dragspeed_t::zero, and dragspeed_t::zero_calibrated.
Here is the call graph for this function:Definition at line 117 of file dragspeed.c.
References dragspeed_t::calibrate_coeff, dragspeed_t::calibrate_zero, and dragspeed.
|
static |
Definition at line 251 of file dragspeed.c.
References dev, dragspeed, foo, FloatEulers::psi, stateGetNedToBodyEulers_f(), stateGetSpeedEnu_f(), dragspeed_t::vel, FloatVect2::x, and FloatVect2::y.
Referenced by dragspeed_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 73 of file dragspeed.c.
Referenced by dragspeed_init().
| struct dragspeed_t dragspeed |
Definition at line 71 of file dragspeed.c.
Referenced by accel_cb(), calibrate_coeff(), calibrate_zero(), dragspeed_calibrate_coeff(), dragspeed_calibrate_zero(), dragspeed_init(), dragspeed_is_calibrating(), and send_dragspeed().