|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
Takeoff functions for bungee takeoff. More...
#include "std.h" Include dependency graph for nav_bungee_takeoff.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_bungee_takeoff.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| bool_t | nav_bungee_takeoff_setup (uint8_t bungee_wp) |
| Initialization function. More... | |
| bool_t | nav_bungee_takeoff_run (void) |
| Bungee takeoff run function. More... | |
Takeoff functions for bungee takeoff.
Run initialize function when the plane is on the bungee, the bungee is fully extended and you are ready to launch the plane. After initialized, the plane will follow a line drawn by the position of the plane on initialization and the position of the bungee (given in the arguments). Once the plane crosses the throttle line, which is perpendicular to the line the plane is following, and intersects the position of the bungee (plus or minus a fixed distance (BUNGEE_TAKEOFF_DISTANCE in airframe file) from the bungee just in case the bungee doesn't release exactly above the bungee) the prop will come on. The plane will then continue to follow the line until it has reached a specific height (defined in as BUNGEE_TAKEOFF_HEIGHT in airframe file) above the bungee waypoint and airspeed (defined as BUNGEE_TAKEOFF_AIRSPEED in the airframe file). The airspeed limit is only used if USE_AIRSPEED flag is defined or set to true (and assuming the airspeed is then available). It is also possible to specify the pitch angle (BUNGEE_TAKEOFF_PITCH) and the throttle (BUNGEE_TAKEOFF_THROTTLE, between 0 and 1).
* <section name="BUNGEE" prefix="BUNGEE_TAKEOFF_"> * <define name="HEIGHT" value="30" unit="m"/> * <define name="AIRSPEED" value="15" unit="m/s"/> * <define name="DISTANCE" value="10" unit="m"/> * <define name="MIN_SPEED" value="5" unit="m/s"/> * <define name="PITCH" value="15." unit="deg"/> * <define name="THROTTLE" value="1.0"/> * </section> *
from OSAM advanced navigation routines
Definition in file nav_bungee_takeoff.h.
| bool_t nav_bungee_takeoff_run | ( | void | ) |
Bungee takeoff run function.
controls the different takeoff phases
Definition at line 161 of file nav_bungee_takeoff.c.
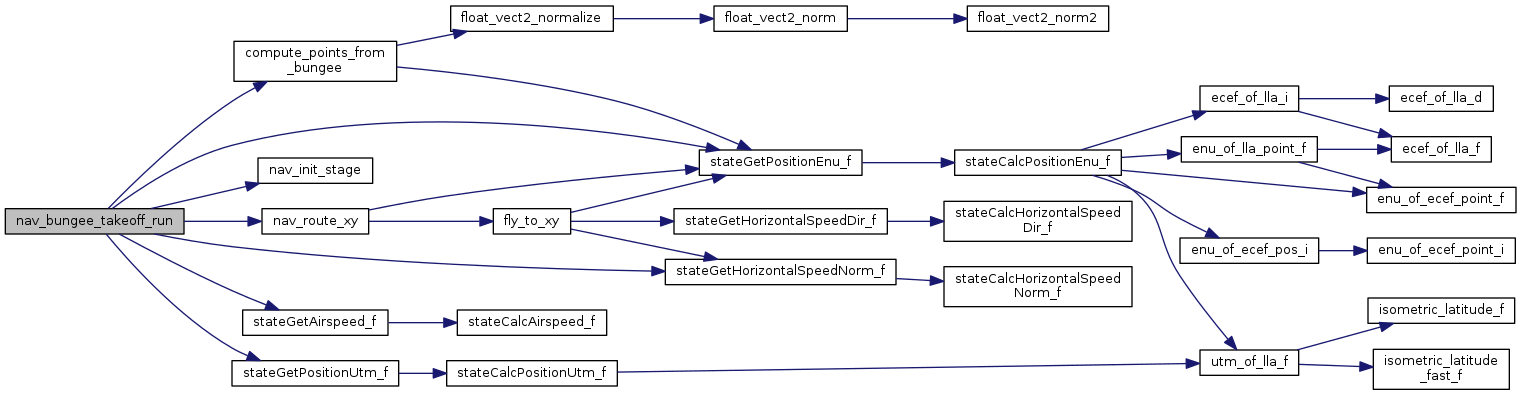
References bungee_point, BUNGEE_TAKEOFF_HEIGHT, BUNGEE_TAKEOFF_MIN_SPEED, BUNGEE_TAKEOFF_PITCH, BUNGEE_TAKEOFF_THROTTLE, compute_points_from_bungee(), CTakeoffStatus, FALSE, Finished, init_point, kill_throttle, Launch, MAX_PPRZ, nav_init_stage(), nav_route_xy(), NavVerticalAutoThrottleMode, NavVerticalThrottleMode, stateGetAirspeed_f(), stateGetHorizontalSpeedNorm_f(), stateGetPositionEnu_f(), stateGetPositionUtm_f(), takeoff_dir, Throttle, throttle_point, TRUE, VECT2_ASSIGN, VECT2_DIFF, VECT2_DOT_PRODUCT, FloatVect2::x, FloatVect2::y, and FloatVect3::z.
Here is the call graph for this function:| bool_t nav_bungee_takeoff_setup | ( | uint8_t | bungee_wp | ) |
Initialization function.
called in the flight plan before the 'run' function
| [in] | bungee_wp | Waypoint ID correcponding to the bungee location |
Definition at line 145 of file nav_bungee_takeoff.c.
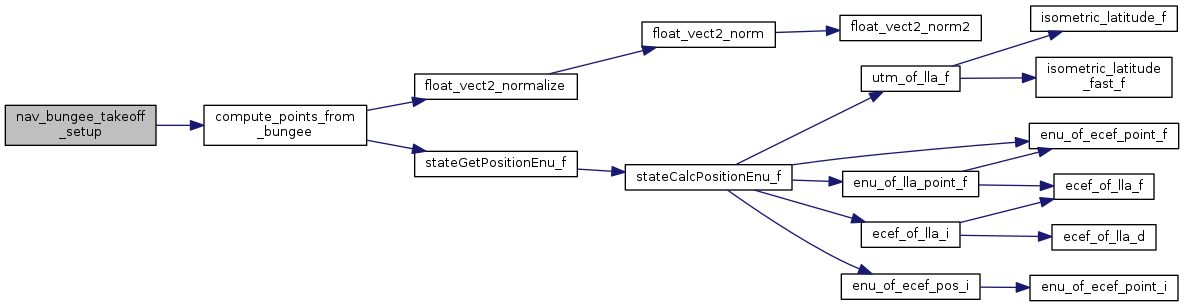
References bungee_point, compute_points_from_bungee(), CTakeoffStatus, FALSE, kill_throttle, Launch, VECT3_ASSIGN, WaypointAlt, WaypointX, and WaypointY.
Here is the call graph for this function: 1.8.8
1.8.8