|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
GPIO helper functions for linux/omap. More...
#include "std.h" Include dependency graph for gpio_arch.h:
Include dependency graph for gpio_arch.h:Go to the source code of this file.
Functions | |
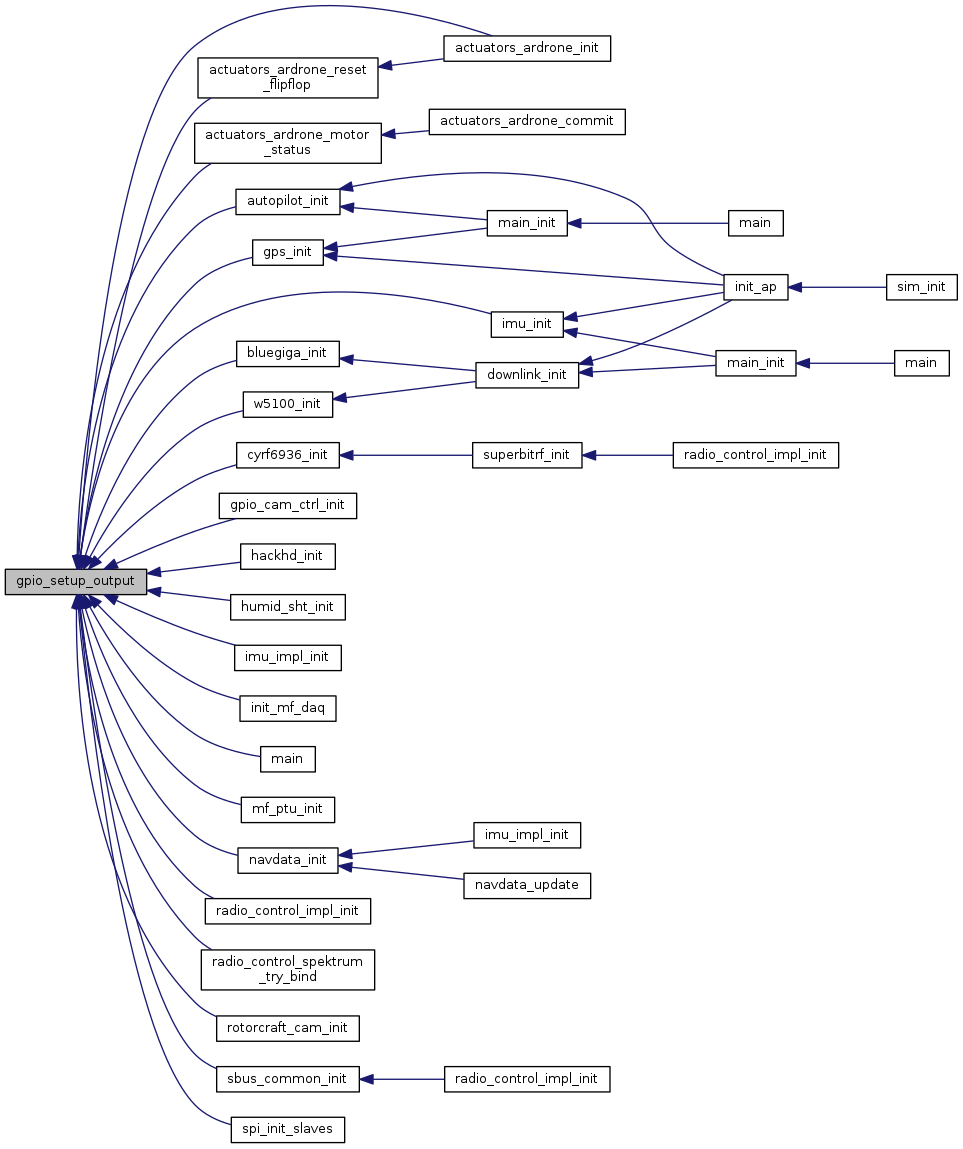
| void | gpio_setup_output (uint32_t port, uint16_t gpios) |
| Setup one or more pins of the given GPIO port as outputs. More... | |
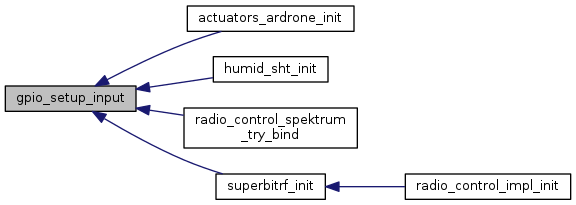
| void | gpio_setup_input (uint32_t port, uint16_t gpios) |
| Setup one or more pins of the given GPIO port as inputs. More... | |
| void | gpio_set (uint32_t port, uint16_t pin) |
| Set a gpio output to high level. More... | |
| void | gpio_clear (uint32_t port, uint16_t pin) |
| Clear a gpio output to low level. More... | |
| uint16_t | gpio_get (uint32_t gpioport, uint16_t gpios) |
| Read a gpio value. More... | |
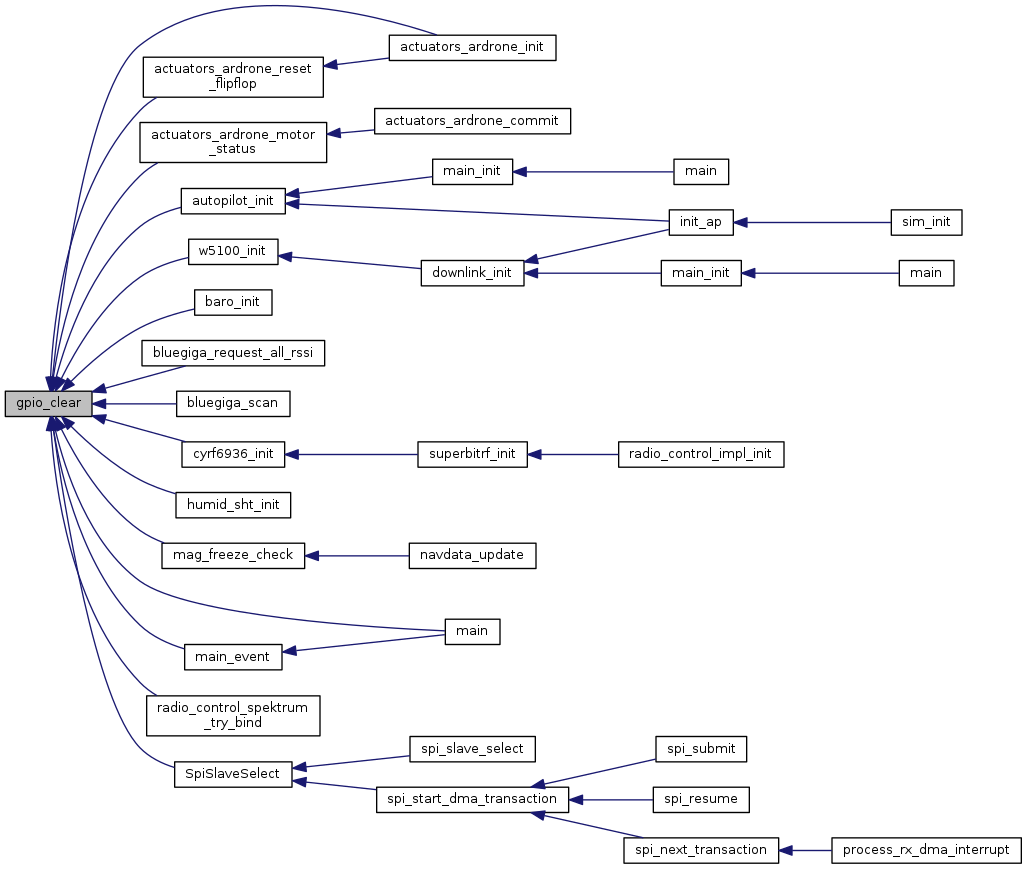
Clear a gpio output to low level.
Definition at line 70 of file gpio_ardrone.c.
References GPIO_WRITE, gpiofp, gpio_data::pin, and gpio_data::value.
Referenced by actuators_ardrone_init(), actuators_ardrone_motor_status(), actuators_ardrone_reset_flipflop(), autopilot_init(), baro_init(), bluegiga_request_all_rssi(), bluegiga_scan(), cyrf6936_init(), humid_sht_init(), mag_freeze_check(), main(), main_event(), radio_control_spektrum_try_bind(), SpiSlaveSelect(), and w5100_init().
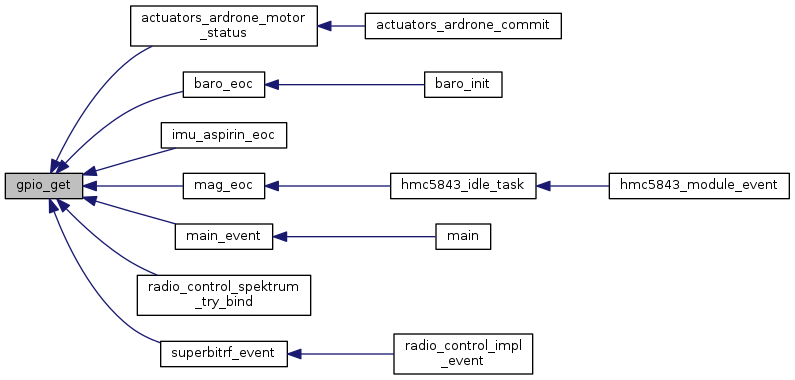
Here is the caller graph for this function:Read a gpio value.
Definition at line 120 of file gpio_ardrone.c.
References GPIO_READ, gpiofp, gpio_data::pin, and gpio_data::value.
Referenced by actuators_ardrone_motor_status(), baro_eoc(), imu_aspirin_eoc(), mag_eoc(), main_event(), radio_control_spektrum_try_bind(), and superbitrf_event().
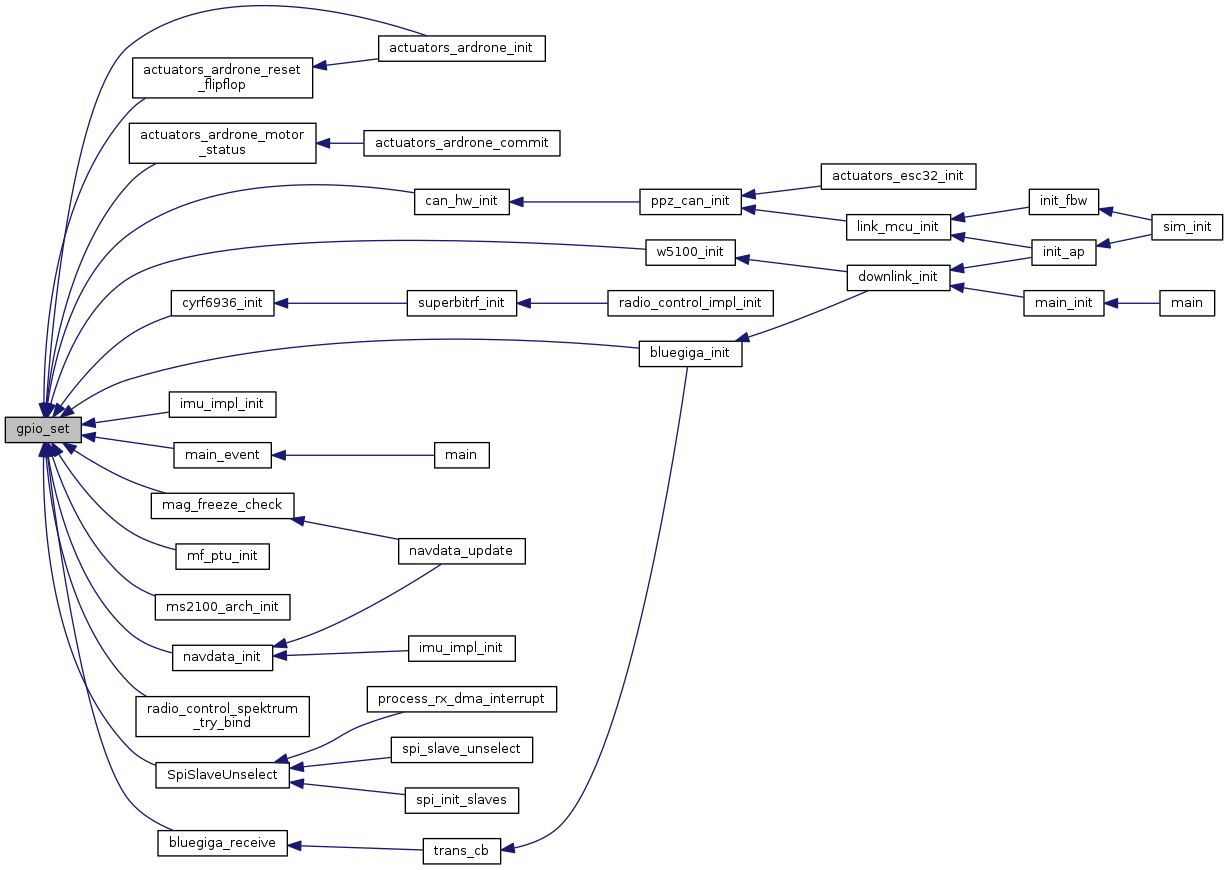
Here is the caller graph for this function:Set a gpio output to high level.
Definition at line 54 of file gpio_ardrone.c.
References GPIO_WRITE, gpiofp, gpio_data::pin, and gpio_data::value.
Referenced by actuators_ardrone_init(), actuators_ardrone_motor_status(), actuators_ardrone_reset_flipflop(), bluegiga_init(), bluegiga_receive(), can_hw_init(), cyrf6936_init(), imu_impl_init(), mag_freeze_check(), main_event(), mf_ptu_init(), ms2100_arch_init(), navdata_init(), radio_control_spektrum_try_bind(), SpiSlaveUnselect(), and w5100_init().
Here is the caller graph for this function:Setup one or more pins of the given GPIO port as inputs.
| [in] | port | |
| [in] | gpios | If multiple pins are to be changed, use logical OR '|' to separate them. |
Definition at line 86 of file gpio_ardrone.c.
Referenced by actuators_ardrone_init(), humid_sht_init(), radio_control_spektrum_try_bind(), and superbitrf_init().
Here is the caller graph for this function:Setup one or more pins of the given GPIO port as outputs.
| [in] | port | |
| [in] | gpios | If multiple pins are to be changed, use logical OR '|' to separate them. |
Definition at line 102 of file gpio_ardrone.c.
Referenced by actuators_ardrone_init(), actuators_ardrone_motor_status(), actuators_ardrone_reset_flipflop(), autopilot_init(), bluegiga_init(), cyrf6936_init(), gpio_cam_ctrl_init(), gps_init(), hackhd_init(), humid_sht_init(), imu_impl_init(), imu_init(), init_mf_daq(), main(), mf_ptu_init(), navdata_init(), radio_control_impl_init(), radio_control_spektrum_try_bind(), rotorcraft_cam_init(), sbus_common_init(), spi_init_slaves(), and w5100_init().
Here is the caller graph for this function: 1.8.8
1.8.8