|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
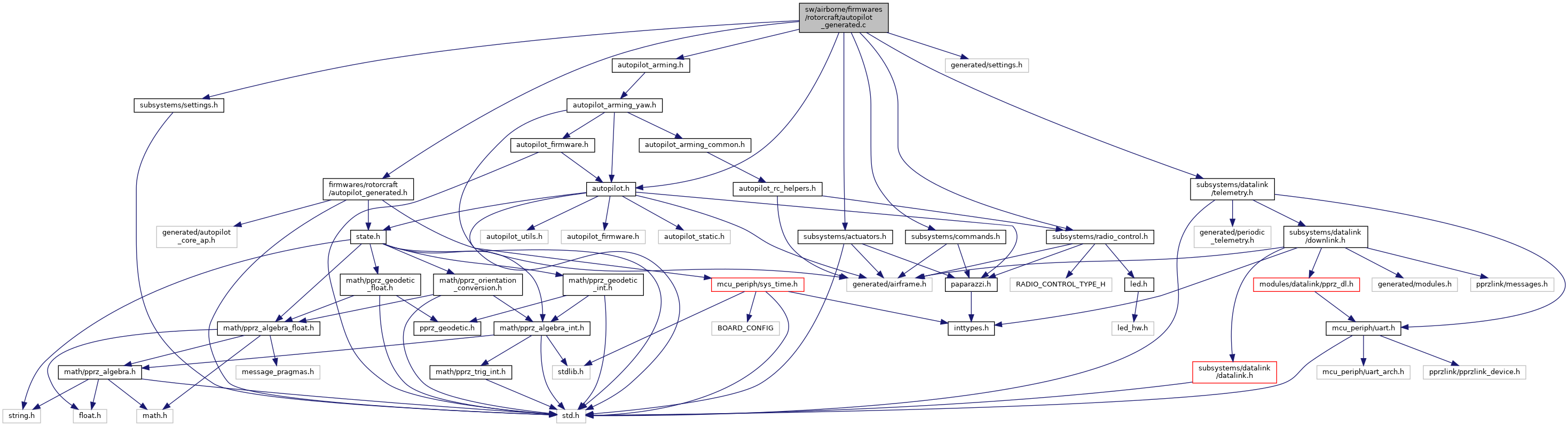
#include "firmwares/rotorcraft/autopilot_generated.h"#include "autopilot.h"#include "autopilot_arming.h"#include "subsystems/radio_control.h"#include "subsystems/commands.h"#include "subsystems/actuators.h"#include "subsystems/settings.h"#include "subsystems/datalink/telemetry.h"#include "generated/settings.h" Include dependency graph for autopilot_generated.c:
Include dependency graph for autopilot_generated.c:Go to the source code of this file.
Macros | |
| #define | AUTOPILOT_CORE_AP_C |
Functions | |
| void | autopilot_generated_init (void) |
| void | autopilot_generated_periodic (void) |
| void | autopilot_generated_SetModeHandler (float mode) |
| AP mode setting handler. More... | |
| void | autopilot_generated_set_mode (uint8_t new_autopilot_mode) |
| void | autopilot_generated_set_motors_on (bool motors_on) |
| void | autopilot_generated_on_rc_frame (void) |
Generated autopilot implementation.
Definition in file autopilot_generated.c.
| #define AUTOPILOT_CORE_AP_C |
Definition at line 27 of file autopilot_generated.c.
| void autopilot_generated_init | ( | void | ) |
Definition at line 42 of file autopilot_generated.c.
References autopilot, autopilot_arming_init(), and pprz_autopilot::mode.
Here is the call graph for this function:| void autopilot_generated_on_rc_frame | ( | void | ) |
Definition at line 104 of file autopilot_generated.c.
References ap_ahrs_is_aligned(), AP_ARMING_STATUS_AHRS_NOT_ALLIGNED, pprz_autopilot::arming_status, autopilot, autopilot_arming_check_motors_on(), pprz_autopilot::kill_throttle, and pprz_autopilot::motors_on.
Here is the call graph for this function:| void autopilot_generated_periodic | ( | void | ) |
Definition at line 54 of file autopilot_generated.c.
References autopilot, autopilot_in_flight(), pprz_autopilot::detect_ground_once, pprz_autopilot::ground_detected, and pprz_autopilot::mode.
Here is the call graph for this function:| void autopilot_generated_set_mode | ( | uint8_t | new_autopilot_mode | ) |
Definition at line 81 of file autopilot_generated.c.
References autopilot, and pprz_autopilot::mode.
| void autopilot_generated_set_motors_on | ( | bool | motors_on | ) |
Definition at line 89 of file autopilot_generated.c.
References ap_ahrs_is_aligned(), AP_MODE_KILL, autopilot, autopilot_arming_set(), pprz_autopilot::mode, and pprz_autopilot::motors_on.
Here is the call graph for this function:| void autopilot_generated_SetModeHandler | ( | float | mode | ) |
AP mode setting handler.
FIXME generated something else for this?
Definition at line 75 of file autopilot_generated.c.
References autopilot_generated_set_mode(), and mode.
Here is the call graph for this function: 1.8.17
1.8.17