|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Rotorcraft attitude reference generation. More...
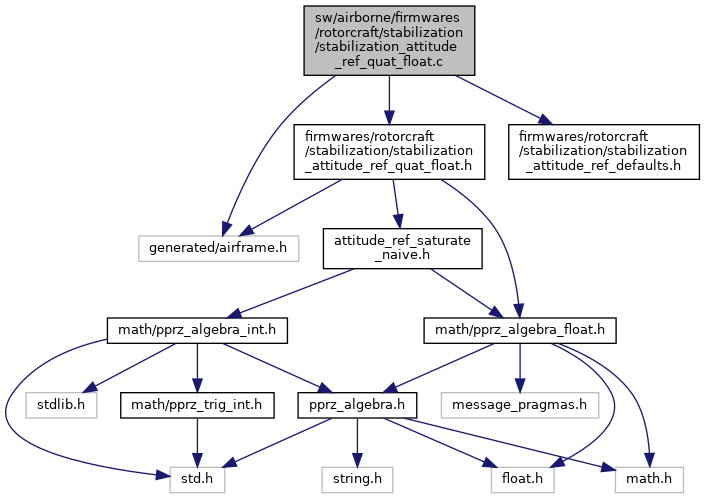
#include "generated/airframe.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_ref_quat_float.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_ref_defaults.h" Include dependency graph for stabilization_attitude_ref_quat_float.c:
Include dependency graph for stabilization_attitude_ref_quat_float.c:Go to the source code of this file.
Macros | |
| #define | STABILIZATION_ATTITUDE_REF_QUAT_INFINITESIMAL_STEP TRUE |
| default to fast but less precise quaternion integration | |
Functions | |
| void | attitude_ref_quat_float_init (struct AttRefQuatFloat *ref) |
| void | attitude_ref_quat_float_enter (struct AttRefQuatFloat *ref, struct FloatQuat *state_quat) |
| void | attitude_ref_quat_float_update (struct AttRefQuatFloat *ref, struct FloatQuat *sp_quat, float dt) |
| void | attitude_ref_quat_float_idx_set_omega_p (struct AttRefQuatFloat *ref, uint8_t idx, float omega) |
| void | attitude_ref_quat_float_idx_set_omega_q (struct AttRefQuatFloat *ref, uint8_t idx, float omega) |
| void | attitude_ref_quat_float_idx_set_omega_r (struct AttRefQuatFloat *ref, uint8_t idx, float omega) |
| void | attitude_ref_quat_float_set_omega_p (struct AttRefQuatFloat *ref, float omega) |
| void | attitude_ref_quat_float_set_omega_q (struct AttRefQuatFloat *ref, float omega) |
| void | attitude_ref_quat_float_set_omega_r (struct AttRefQuatFloat *ref, float omega) |
| void | attitude_ref_quat_float_schedule (struct AttRefQuatFloat *ref, uint8_t idx) |
Rotorcraft attitude reference generation.
(quaternion float version)
Definition in file stabilization_attitude_ref_quat_float.c.
default to fast but less precise quaternion integration
Definition at line 37 of file stabilization_attitude_ref_quat_float.c.
| void attitude_ref_quat_float_enter | ( | struct AttRefQuatFloat * | ref, |
| struct FloatQuat * | state_quat | ||
| ) |
Definition at line 78 of file stabilization_attitude_ref_quat_float.c.
References FLOAT_RATES_ZERO, foo, QUAT_COPY, and ref.
Referenced by stabilization_attitude_enter().
Here is the caller graph for this function:| void attitude_ref_quat_float_idx_set_omega_p | ( | struct AttRefQuatFloat * | ref, |
| uint8_t | idx, | ||
| float | omega | ||
| ) |
Definition at line 140 of file stabilization_attitude_ref_quat_float.c.
Referenced by attitude_ref_quat_float_set_omega_p().
Here is the caller graph for this function:| void attitude_ref_quat_float_idx_set_omega_q | ( | struct AttRefQuatFloat * | ref, |
| uint8_t | idx, | ||
| float | omega | ||
| ) |
Definition at line 146 of file stabilization_attitude_ref_quat_float.c.
Referenced by attitude_ref_quat_float_set_omega_q().
Here is the caller graph for this function:| void attitude_ref_quat_float_idx_set_omega_r | ( | struct AttRefQuatFloat * | ref, |
| uint8_t | idx, | ||
| float | omega | ||
| ) |
Definition at line 152 of file stabilization_attitude_ref_quat_float.c.
Referenced by attitude_ref_quat_float_set_omega_r().
Here is the caller graph for this function:| void attitude_ref_quat_float_init | ( | struct AttRefQuatFloat * | ref | ) |
Definition at line 55 of file stabilization_attitude_ref_quat_float.c.
References FLOAT_EULERS_ZERO, float_quat_identity(), FLOAT_RATES_ZERO, omega_p, omega_q, omega_r, RATES_ASSIGN, ref, STABILIZATION_ATTITUDE_GAIN_NB, STABILIZATION_ATTITUDE_REF_MAX_P, STABILIZATION_ATTITUDE_REF_MAX_PDOT, STABILIZATION_ATTITUDE_REF_MAX_Q, STABILIZATION_ATTITUDE_REF_MAX_QDOT, STABILIZATION_ATTITUDE_REF_MAX_R, STABILIZATION_ATTITUDE_REF_MAX_RDOT, zeta_p, zeta_q, and zeta_r.
Referenced by stabilization_attitude_quat_float_init().
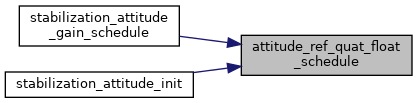
Here is the call graph for this function: Here is the caller graph for this function:| void attitude_ref_quat_float_schedule | ( | struct AttRefQuatFloat * | ref, |
| uint8_t | idx | ||
| ) |
Definition at line 177 of file stabilization_attitude_ref_quat_float.c.
Referenced by stabilization_attitude_gain_schedule(), and stabilization_attitude_quat_float_init().
Here is the caller graph for this function:| void attitude_ref_quat_float_set_omega_p | ( | struct AttRefQuatFloat * | ref, |
| float | omega | ||
| ) |
Definition at line 158 of file stabilization_attitude_ref_quat_float.c.
References attitude_ref_quat_float_idx_set_omega_p(), and ref.
Here is the call graph for this function:| void attitude_ref_quat_float_set_omega_q | ( | struct AttRefQuatFloat * | ref, |
| float | omega | ||
| ) |
Definition at line 163 of file stabilization_attitude_ref_quat_float.c.
References attitude_ref_quat_float_idx_set_omega_q(), and ref.
Here is the call graph for this function:| void attitude_ref_quat_float_set_omega_r | ( | struct AttRefQuatFloat * | ref, |
| float | omega | ||
| ) |
Definition at line 168 of file stabilization_attitude_ref_quat_float.c.
References attitude_ref_quat_float_idx_set_omega_r(), and ref.
Here is the call graph for this function:| void attitude_ref_quat_float_update | ( | struct AttRefQuatFloat * | ref, |
| struct FloatQuat * | sp_quat, | ||
| float | dt | ||
| ) |
Definition at line 88 of file stabilization_attitude_ref_quat_float.c.
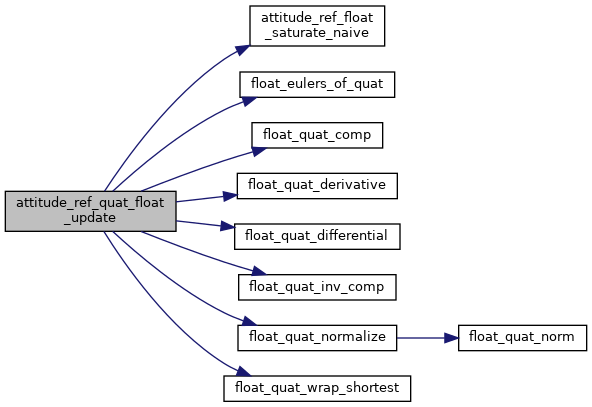
References attitude_ref_float_saturate_naive(), float_eulers_of_quat(), float_quat_comp(), float_quat_derivative(), float_quat_differential(), float_quat_inv_comp(), float_quat_normalize(), float_quat_wrap_shortest(), foo, QUAT_ADD, QUAT_COPY, QUAT_SMUL, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, RATES_ADD, RATES_SMUL, and ref.
Referenced by stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 42 of file stabilization_attitude_ref_quat_float.c.
Referenced by attitude_ref_quat_float_init(), and attitude_ref_quat_int_set_omega_p().
|
static |
Definition at line 44 of file stabilization_attitude_ref_quat_float.c.
Referenced by attitude_ref_quat_float_init(), and attitude_ref_quat_int_set_omega_q().
|
static |
Definition at line 46 of file stabilization_attitude_ref_quat_float.c.
Referenced by attitude_ref_quat_float_init(), and attitude_ref_quat_int_set_omega_r().
|
static |
Definition at line 43 of file stabilization_attitude_ref_quat_float.c.
Referenced by attitude_ref_quat_float_init(), and attitude_ref_quat_int_set_zeta_p().
|
static |
Definition at line 45 of file stabilization_attitude_ref_quat_float.c.
Referenced by attitude_ref_quat_float_init(), and attitude_ref_quat_int_set_zeta_q().
|
static |
Definition at line 47 of file stabilization_attitude_ref_quat_float.c.
Referenced by attitude_ref_quat_float_init(), and attitude_ref_quat_int_set_zeta_r().