|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
UAVCan actuators using RAWCOMMAND message and ESC_STATUS telemetry. More...
#include "actuators_uavcan.h"#include "modules/energy/electrical.h"#include "math/pprz_random.h"#include "modules/core/abi.h"#include "modules/actuators/actuators.h"#include "uavcan.equipment.esc.Status.h"#include "uavcan.equipment.esc.RawCommand.h"#include "uavcan.equipment.actuator.Status.h"#include "uavcan.equipment.actuator.ArrayCommand.h"#include "uavcan.equipment.device.Temperature.h"#include "modules/datalink/telemetry.h" Include dependency graph for actuators_uavcan.c:
Include dependency graph for actuators_uavcan.c:Go to the source code of this file.
Data Structures | |
| struct | actuators_uavcan_telem_t |
Macros | |
| #define | UAVCAN_ACTUATORS_USE_CURRENT TRUE |
| #define | UAVCAN_CMD_UNUSED (MIN_PPRZ-1) |
UAVCan actuators using RAWCOMMAND message and ESC_STATUS telemetry.
Definition in file actuators_uavcan.c.
| struct actuators_uavcan_telem_t |
Definition at line 42 of file actuators_uavcan.c.
Definition at line 111 of file actuators_uavcan.c.
|
static |
Whevener an ACTUATOR_STATUS message from the EQUIPMENT group is received.
Definition at line 296 of file actuators_uavcan.c.
References ACT_FEEDBACK_UAVCAN_ID, foo, get_actuator_idx(), get_actuator_telem(), act_feedback_t::idx, msg, act_feedback_t::act_feedback_set_t::position, act_feedback_t::position, act_feedback_t::set, and transfer().
Referenced by actuators_uavcan_init().
Here is the call graph for this function: Here is the caller graph for this function:| void actuators_uavcan_cmd_commit | ( | struct uavcan_iface_t * | iface, |
| int16_t * | values, | ||
| uint8_t | nb | ||
| ) |
Commit actuator values to the uavcan interface (EQUIPMENT_ACTUATOR_ARRAYCOMMAND)
Definition at line 409 of file actuators_uavcan.c.
References foo, MAX_PPRZ, MIN_PPRZ, msg, uavcan_broadcast(), and UAVCAN_CMD_UNUSED.
Here is the call graph for this function:| void actuators_uavcan_commit | ( | struct uavcan_iface_t * | iface, |
| int16_t * | values, | ||
| uint8_t | nb | ||
| ) |
Commit actuator values to the uavcan interface (EQUIPMENT_ESC_RAWCOMMAND)
Definition at line 388 of file actuators_uavcan.c.
References foo, msg, and uavcan_broadcast().
Here is the call graph for this function:
|
static |
Whevener an DEVICE_TEMPERATURE message from the EQUIPMENT group is received.
Definition at line 326 of file actuators_uavcan.c.
References foo, get_actuator_telem(), msg, and transfer().
Referenced by actuators_uavcan_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Whevener an ESC_STATUS message from the EQUIPMENT group is received.
Definition at line 239 of file actuators_uavcan.c.
References ACT_FEEDBACK_UAVCAN_ID, Electrical::current, electrical, foo, get_actuator_idx(), get_actuator_telem(), get_sys_time_float(), act_feedback_t::idx, msg, act_feedback_t::act_feedback_set_t::rpm, act_feedback_t::rpm, act_feedback_t::set, and transfer().
Referenced by actuators_uavcan_init().
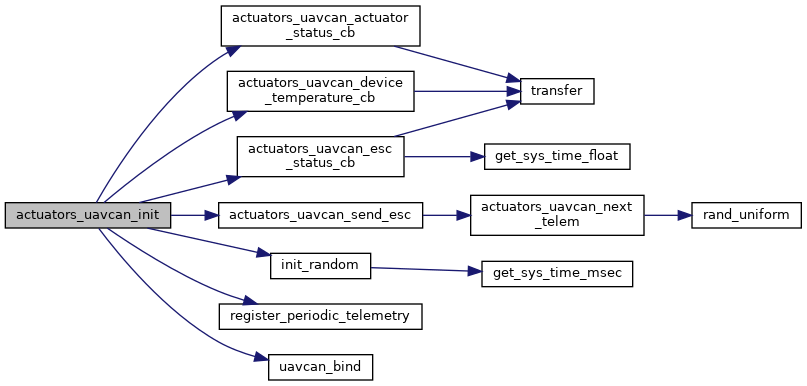
Here is the call graph for this function: Here is the caller graph for this function:| void actuators_uavcan_init | ( | struct uavcan_iface_t * | iface | ) |
Initialize an uavcan interface.
Definition at line 348 of file actuators_uavcan.c.
References actuator_status_ev, actuators_uavcan1cmd_values, actuators_uavcan2cmd_values, actuators_uavcan_actuator_status_cb(), actuators_uavcan_device_temperature_cb(), actuators_uavcan_esc_status_cb(), actuators_uavcan_initialized, actuators_uavcan_send_esc(), DefaultPeriodic, device_temperature_ev, esc_status_ev, foo, init_random(), register_periodic_telemetry(), uavcan_bind(), and UAVCAN_CMD_UNUSED.
Here is the call graph for this function:
|
static |
Definition at line 124 of file actuators_uavcan.c.
References esc_idx, foo, offset, old_idx, rand_uniform(), and actuators_uavcan_telem_t::set.
Referenced by actuators_uavcan_send_esc().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 163 of file actuators_uavcan.c.
References actuators_uavcan_next_telem(), dev, electrical, actuators_uavcan_telem_t::energy, foo, old_idx, rpm, and Electrical::vsupply.
Referenced by actuators_uavcan_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 201 of file actuators_uavcan.c.
References actuators_uavcan1cmd_values, actuators_uavcan2cmd_values, foo, idx, and UAVCAN_CMD_UNUSED.
Referenced by actuators_uavcan_actuator_status_cb(), and actuators_uavcan_esc_status_cb().
Here is the caller graph for this function:
|
static |
Definition at line 184 of file actuators_uavcan.c.
Referenced by actuators_uavcan_actuator_status_cb(), actuators_uavcan_device_temperature_cb(), and actuators_uavcan_esc_status_cb().
Here is the caller graph for this function:
|
static |
Definition at line 116 of file actuators_uavcan.c.
Referenced by actuators_uavcan_init().
Definition at line 114 of file actuators_uavcan.c.
Referenced by actuators_uavcan_init().
|
static |
Definition at line 117 of file actuators_uavcan.c.
Referenced by actuators_uavcan_init().
|
static |
Definition at line 123 of file actuators_uavcan.c.
Referenced by actuators_uavcan_next_telem().
|
static |
Definition at line 115 of file actuators_uavcan.c.
Referenced by actuators_uavcan_init().
|
static |
Definition at line 122 of file actuators_uavcan.c.
Referenced by actuators_uavcan_next_telem(), and actuators_uavcan_send_esc().