|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
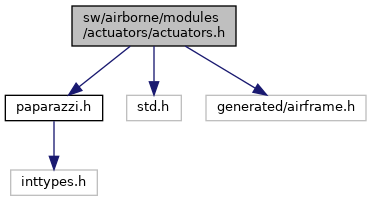
Hardware independent API for actuators (servos, motor controllers). More...
 Include dependency graph for actuators.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for actuators.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | act_feedback_t |
| struct | act_feedback_t::act_feedback_set_t |
| struct | act_config_t |
Typedefs | |
| typedef void(* | act_set_t) (uint8_t driver_idx, int16_t driver_value) |
| Actuator set callback. | |
Functions | |
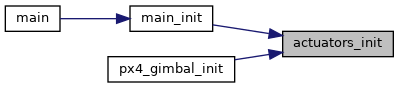
| void | actuators_init (void) |
| void | actuators_periodic (void) |
Hardware independent API for actuators (servos, motor controllers).
Definition in file actuators.h.
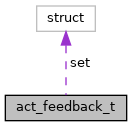
| struct act_feedback_t |
Definition at line 44 of file actuators.h.
Collaboration diagram for act_feedback_t:| Data Fields | ||
|---|---|---|
| uint8_t | idx | General index of the actuators (generated in airframe.h) |
| float | position | In radians. |
| int32_t | rpm | RPM. |
| struct act_feedback_set_t | set | Bitset registering what is set as feedback. |
| struct act_feedback_t::act_feedback_set_t |
Definition at line 46 of file actuators.h.
| Data Fields | ||
|---|---|---|
| bool | position: 1 | Position is set. |
| bool | rpm: 1 | RPM is set. |
| struct act_config_t |
Definition at line 56 of file actuators.h.
| Data Fields | ||
|---|---|---|
| uint8_t | driver_no | Driver number. |
| int32_t | max | Driver max value (or motor max position) |
| int32_t | min | Driver min value (or motor stop position) |
| int32_t | neutral | Driver neutral value (or motor idle position) |
| uint8_t | servo_idx | Driver servo index. |
| float | travel_down | Precomputed travel down coef. |
| float | travel_up | Precomputed travel up coef. |
| typedef void(* act_set_t) (uint8_t driver_idx, int16_t driver_value) |
Actuator set callback.
| driver_idx | actuator index in driver frame |
| driver_value | actuator value in driver unit |
Definition at line 71 of file actuators.h.
Definition at line 324 of file actuators.c.
Referenced by main_init(), main_init(), and px4_gimbal_init().
Here is the caller graph for this function:Definition at line 325 of file actuators.c.