|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
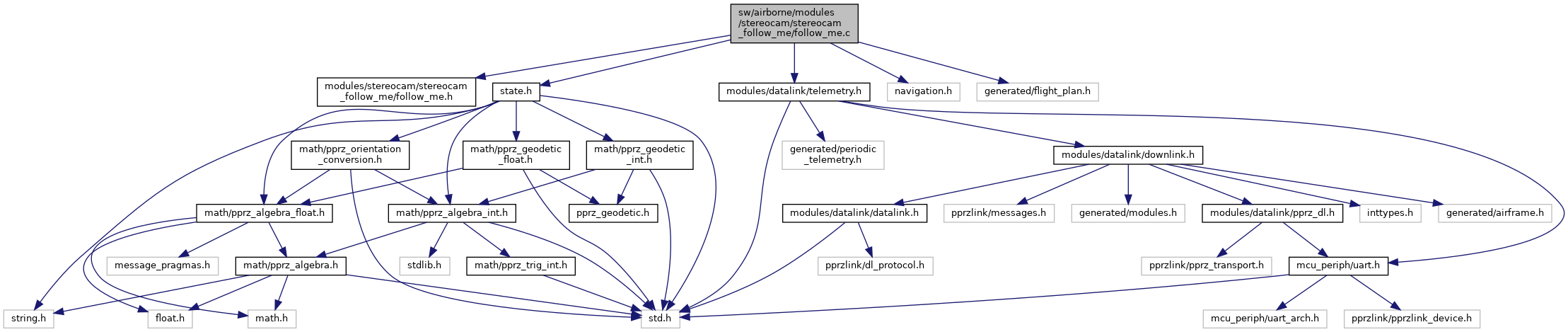
#include "modules/stereocam/stereocam_follow_me/follow_me.h"#include "state.h"#include "navigation.h"#include "modules/datalink/telemetry.h"#include "generated/flight_plan.h" Include dependency graph for follow_me.c:
Include dependency graph for follow_me.c:Go to the source code of this file.
Variables | |
| float | ref_pitch = 0.0 |
| float | ref_roll = 0.0 |
| float | selfie_alt = 1.0 |
Definition in file follow_me.c.
| #define CENTER_IMAGE_HOR 65 |
Definition at line 27 of file follow_me.c.
Definition at line 26 of file follow_me.c.
| #define MAXIMUM_ALTITUDE_FOLLOWING 3.0 |
Definition at line 28 of file follow_me.c.
| #define MINIMUM_ALTITUDE_FOLLOWING 1.0 |
Definition at line 29 of file follow_me.c.
Definition at line 23 of file follow_me.c.
|
static |
Definition at line 35 of file follow_me.c.
References foo.
Referenced by follow_me().
Here is the caller graph for this function:Definition at line 62 of file follow_me.c.
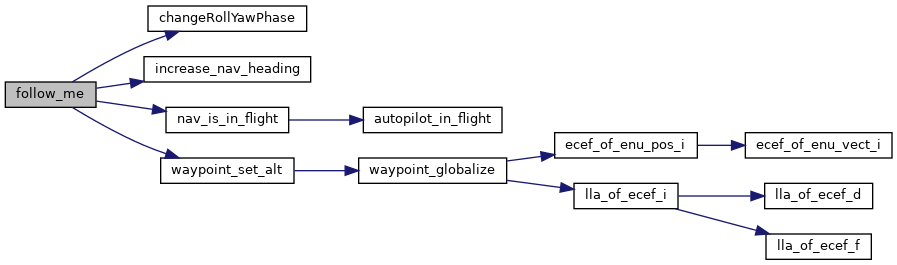
References CENTER_IMAGE_HOR, changeRollYawPhase(), foo, RotorcraftNavigation::heading, HEADING_CHANGE_PER_MEASUREMENT, increase_nav_heading(), MAXIMUM_ALTITUDE_FOLLOWING, MINIMUM_ALTITUDE_FOLLOWING, nav, nav_is_in_flight(), ref_pitch, ref_roll, selfie_alt, STEREOCAM_FOLLOW_ME_USE_OPTITRACK, and waypoint_set_alt().
Referenced by stereocam_parse_msg().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 57 of file follow_me.c.
Referenced by follow_me().
Here is the caller graph for this function:| float ref_pitch = 0.0 |
Definition at line 31 of file follow_me.c.
Referenced by follow_me().
| float ref_roll = 0.0 |
Definition at line 32 of file follow_me.c.
Referenced by follow_me().
| float selfie_alt = 1.0 |
Definition at line 33 of file follow_me.c.
Referenced by follow_me().