|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
API to get/set the generic vehicle states. More...
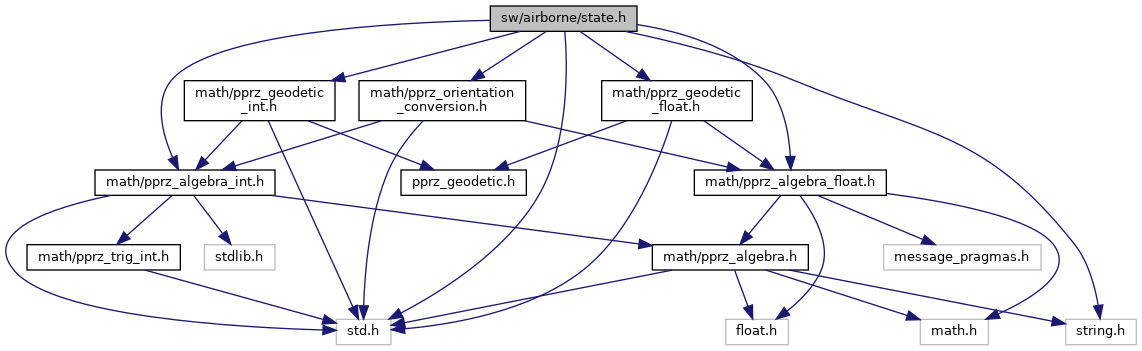
#include "math/pprz_algebra_int.h"#include "math/pprz_algebra_float.h"#include "math/pprz_geodetic_int.h"#include "math/pprz_geodetic_float.h"#include "math/pprz_orientation_conversion.h"#include "std.h"#include <string.h> Include dependency graph for state.h:
Include dependency graph for state.h:Go to the source code of this file.
Data Structures | |
| struct | State |
| Structure holding vehicle state data. More... | |
| union | State.windspeed_i |
| Horizontal windspeed in north/east/down. More... | |
| union | State.windspeed_f |
| Horizontal windspeed. More... | |
Functions | |
| void | stateInit (void) |
| void | stateSetInputFilter (uint8_t type, uint16_t id) |
| set the input filter for a specified type of data. | |
| static void | stateSetLocalOrigin_i (uint16_t id, struct LtpDef_i *ltp_def) |
| Set the local (flat earth) coordinate frame origin (int). | |
| static void | stateSetLocalUtmOrigin_f (uint16_t id, struct UtmCoor_f *utm_def) |
| Set the local (flat earth) coordinate frame origin from UTM (float). | |
| static struct LtpDef_i * | stateGetNedOrigin_i (void) |
| Get the coordinate NED frame origin (int) | |
| static struct LtpDef_f * | stateGetNedOrigin_f (void) |
| Get the coordinate NED frame origin (float) | |
| static struct UtmCoor_f * | stateGetUtmOrigin_f (void) |
| Get the coordinate UTM frame origin (int) | |
| struct LlaCoor_i | stateGetLlaOrigin_i (void) |
| Get the LLA position of the frame origin (int) | |
| struct LlaCoor_f | stateGetLlaOrigin_f (void) |
| Get the LLA position of the frame origin (float) | |
| struct EcefCoor_i | stateGetEcefOrigin_i (void) |
| Get the ECEF position of the frame origin (int) | |
| struct EcefCoor_f | stateGetEcefOrigin_f (void) |
| Get the ECEF position of the frame origin (float) | |
| int32_t | stateGetHmslOrigin_i (void) |
| Get the HMSL of the frame origin (int) | |
| float | stateGetHmslOrigin_f (void) |
| Get the HMSL of the frame origin (float) | |
| void | stateCalcPositionEcef_i (void) |
| void | stateCalcPositionNed_i (void) |
| void | stateCalcPositionEnu_i (void) |
| void | stateCalcPositionLla_i (void) |
| Calculate LLA (int) from any other available representation. | |
| void | stateCalcPositionUtm_f (void) |
| void | stateCalcPositionEcef_f (void) |
| void | stateCalcPositionNed_f (void) |
| void | stateCalcPositionEnu_f (void) |
| void | stateCalcPositionLla_f (void) |
| static bool | stateIsLocalCoordinateValid (void) |
| Test if local coordinates are valid. | |
| static bool | stateIsGlobalCoordinateValid (void) |
| Test if global coordinates are valid. | |
| static void | stateSetPositionEcef_i (uint16_t id, struct EcefCoor_i *ecef_pos) |
| Set position from ECEF coordinates (int). | |
| static void | stateSetPositionNed_i (uint16_t id, struct NedCoor_i *ned_pos) |
| Set position from local NED coordinates (int). | |
| static void | stateSetPositionEnu_i (uint16_t id, struct EnuCoor_i *enu_pos) |
| Set position from local ENU coordinates (int). | |
| static void | stateSetPositionLla_i (uint16_t id, struct LlaCoor_i *lla_pos) |
| Set position from LLA coordinates (int). | |
| static void | stateSetPosition_i (uint16_t id, struct EcefCoor_i *ecef_pos, struct NedCoor_i *ned_pos, struct EnuCoor_i *enu_pos, struct LlaCoor_i *lla_pos) |
| Set multiple position coordinates (int). | |
| static void | stateSetPositionUtm_f (uint16_t id, struct UtmCoor_f *utm_pos) |
| Set position from UTM coordinates (float). | |
| static void | stateSetPositionEcef_f (uint16_t id, struct EcefCoor_f *ecef_pos) |
| Set position from ECEF coordinates (float). | |
| static void | stateSetPositionNed_f (uint16_t id, struct NedCoor_f *ned_pos) |
| Set position from local NED coordinates (float). | |
| static void | stateSetPositionEnu_f (uint16_t id, struct EnuCoor_f *enu_pos) |
| Set position from local ENU coordinates (float). | |
| static void | stateSetPositionLla_f (uint16_t id, struct LlaCoor_f *lla_pos) |
| Set position from LLA coordinates (float). | |
| static void | stateSetPosition_f (uint16_t id, struct EcefCoor_f *ecef_pos, struct NedCoor_f *ned_pos, struct EnuCoor_f *enu_pos, struct LlaCoor_f *lla_pos, struct UtmCoor_f *utm_pos) |
| Set multiple position coordinates (float). | |
| static struct EcefCoor_i * | stateGetPositionEcef_i (void) |
| Get position in ECEF coordinates (int). | |
| static struct NedCoor_i * | stateGetPositionNed_i (void) |
| Get position in local NED coordinates (int). | |
| static struct EnuCoor_i * | stateGetPositionEnu_i (void) |
| Get position in local ENU coordinates (int). | |
| static struct LlaCoor_i * | stateGetPositionLla_i (void) |
| Get position in LLA coordinates (int). | |
| static struct UtmCoor_f * | stateGetPositionUtm_f (void) |
| Get position in UTM coordinates (float). | |
| static struct EcefCoor_f * | stateGetPositionEcef_f (void) |
| Get position in ECEF coordinates (float). | |
| static struct NedCoor_f * | stateGetPositionNed_f (void) |
| Get position in local NED coordinates (float). | |
| static struct EnuCoor_f * | stateGetPositionEnu_f (void) |
| Get position in local ENU coordinates (float). | |
| static struct LlaCoor_f * | stateGetPositionLla_f (void) |
| Get position in LLA coordinates (float). | |
| void | stateCalcSpeedNed_i (void) |
| void | stateCalcSpeedEnu_i (void) |
| void | stateCalcSpeedEcef_i (void) |
| void | stateCalcHorizontalSpeedNorm_i (void) |
| void | stateCalcHorizontalSpeedDir_i (void) |
| void | stateCalcSpeedNed_f (void) |
| void | stateCalcSpeedEnu_f (void) |
| void | stateCalcSpeedEcef_f (void) |
| void | stateCalcHorizontalSpeedNorm_f (void) |
| void | stateCalcHorizontalSpeedDir_f (void) |
| static void | stateSetSpeedNed_i (uint16_t id, struct NedCoor_i *ned_speed) |
| Set ground speed in local NED coordinates (int). | |
| static void | stateSetSpeedEnu_i (uint16_t id, struct EnuCoor_i *enu_speed) |
| Set ground speed in local ENU coordinates (int). | |
| static void | stateSetSpeedEcef_i (uint16_t id, struct EcefCoor_i *ecef_speed) |
| Set ground speed in ECEF coordinates (int). | |
| static void | stateSetSpeed_i (uint16_t id, struct EcefCoor_i *ecef_speed, struct NedCoor_i *ned_speed, struct EnuCoor_i *enu_speed) |
| Set multiple speed coordinates (int). | |
| static void | stateSetSpeedNed_f (uint16_t id, struct NedCoor_f *ned_speed) |
| Set ground speed in local NED coordinates (float). | |
| static void | stateSetSpeedEnu_f (uint16_t id, struct EnuCoor_f *enu_speed) |
| Set ground speed in local ENU coordinates (float). | |
| static void | stateSetSpeedEcef_f (uint16_t id, struct EcefCoor_f *ecef_speed) |
| Set ground speed in ECEF coordinates (float). | |
| static void | stateSetSpeed_f (uint16_t id, struct EcefCoor_f *ecef_speed, struct NedCoor_f *ned_speed, struct EnuCoor_f *enu_speed) |
| Set multiple speed coordinates (float). | |
| static struct NedCoor_i * | stateGetSpeedNed_i (void) |
| Get ground speed in local NED coordinates (int). | |
| static struct EnuCoor_i * | stateGetSpeedEnu_i (void) |
| Get ground speed in local ENU coordinates (int). | |
| static struct EcefCoor_i * | stateGetSpeedEcef_i (void) |
| Get ground speed in ECEF coordinates (int). | |
| static uint32_t | stateGetHorizontalSpeedNorm_i (void) |
| Get norm of horizontal ground speed (int). | |
| static int32_t | stateGetHorizontalSpeedDir_i (void) |
| Get dir of horizontal ground speed (int). | |
| static struct NedCoor_f * | stateGetSpeedNed_f (void) |
| Get ground speed in local NED coordinates (float). | |
| static struct EnuCoor_f * | stateGetSpeedEnu_f (void) |
| Get ground speed in local ENU coordinates (float). | |
| static struct EcefCoor_f * | stateGetSpeedEcef_f (void) |
| Get ground speed in ECEF coordinates (float). | |
| static float | stateGetHorizontalSpeedNorm_f (void) |
| Get norm of horizontal ground speed (float). | |
| static float | stateGetHorizontalSpeedDir_f (void) |
| Get dir of horizontal ground speed (float). | |
| static struct Int32Vect3 * | stateGetAccelBody_i (void) |
| Get acceleration in Body coordinates (int). | |
| static struct FloatVect3 * | stateGetAccelBody_f (void) |
| void | stateCalcAccelNed_i (void) |
| void | stateCalcAccelEcef_i (void) |
| void | stateCalcAccelNed_f (void) |
| void | stateCalcAccelEcef_f (void) |
| static bool | stateIsAccelValid (void) |
| Test if accelerations are valid. | |
| static void | stateSetAccelNed_i (uint16_t id, struct NedCoor_i *ned_accel) |
| Set acceleration in NED coordinates (int). | |
| static void | stateSetAccelEcef_i (uint16_t id, struct EcefCoor_i *ecef_accel) |
| Set acceleration in ECEF coordinates (int). | |
| static void | stateSetAccelNed_f (uint16_t id, struct NedCoor_f *ned_accel) |
| Set acceleration in NED coordinates (float). | |
| static void | stateSetAccelEcef_f (uint16_t id, struct EcefCoor_f *ecef_accel) |
| Set acceleration in ECEF coordinates (float). | |
| static void | stateSetAccelBody_i (uint16_t id, struct Int32Vect3 *body_accel) |
| Set acceleration in Body coordinates (int). | |
| static struct NedCoor_i * | stateGetAccelNed_i (void) |
| Get acceleration in NED coordinates (int). | |
| static struct EcefCoor_i * | stateGetAccelEcef_i (void) |
| Get acceleration in ECEF coordinates (int). | |
| static struct NedCoor_f * | stateGetAccelNed_f (void) |
| Get acceleration in NED coordinates (float). | |
| static struct EcefCoor_f * | stateGetAccelEcef_f (void) |
| Get acceleration in ECEF coordinates (float). | |
| static bool | stateIsAttitudeValid (void) |
| Test if attitudes are valid. | |
| static void | stateSetNedToBodyQuat_i (uint16_t id, struct Int32Quat *ned_to_body_quat) |
| Set vehicle body attitude from quaternion (int). | |
| static void | stateSetNedToBodyRMat_i (uint16_t id, struct Int32RMat *ned_to_body_rmat) |
| Set vehicle body attitude from rotation matrix (int). | |
| static void | stateSetNedToBodyEulers_i (uint16_t id, struct Int32Eulers *ned_to_body_eulers) |
| Set vehicle body attitude from euler angles (int). | |
| static void | stateSetNedToBodyQuat_f (uint16_t id, struct FloatQuat *ned_to_body_quat) |
| Set vehicle body attitude from quaternion (float). | |
| static void | stateSetNedToBodyRMat_f (uint16_t id, struct FloatRMat *ned_to_body_rmat) |
| Set vehicle body attitude from rotation matrix (float). | |
| static void | stateSetNedToBodyEulers_f (uint16_t id, struct FloatEulers *ned_to_body_eulers) |
| Set vehicle body attitude from euler angles (float). | |
| static struct Int32Quat * | stateGetNedToBodyQuat_i (void) |
| Get vehicle body attitude quaternion (int). | |
| static struct Int32RMat * | stateGetNedToBodyRMat_i (void) |
| Get vehicle body attitude rotation matrix (int). | |
| static struct Int32Eulers * | stateGetNedToBodyEulers_i (void) |
| Get vehicle body attitude euler angles (int). | |
| static struct FloatQuat * | stateGetNedToBodyQuat_f (void) |
| Get vehicle body attitude quaternion (float). | |
| static struct FloatRMat * | stateGetNedToBodyRMat_f (void) |
| Get vehicle body attitude rotation matrix (float). | |
| static struct FloatEulers * | stateGetNedToBodyEulers_f (void) |
| Get vehicle body attitude euler angles (float). | |
| void | stateCalcBodyRates_i (void) |
| void | stateCalcBodyRates_f (void) |
| static bool | stateIsRateValid (void) |
| Test if rates are valid. | |
| static void | stateSetBodyRates_i (uint16_t id, struct Int32Rates *body_rate) |
| Set vehicle body angular rate (int). | |
| static void | stateSetBodyRates_f (uint16_t id, struct FloatRates *body_rate) |
| Set vehicle body angular rate (float). | |
| static struct Int32Rates * | stateGetBodyRates_i (void) |
| Get vehicle body angular rate (int). | |
| static struct FloatRates * | stateGetBodyRates_f (void) |
| Get vehicle body angular rate (float). | |
| void | stateCalcHorizontalWindspeed_i (void) |
| void | stateCalcVerticalWindspeed_i (void) |
| void | stateCalcAirspeed_i (void) |
| void | stateCalcHorizontalWindspeed_f (void) |
| void | stateCalcVerticalWindspeed_f (void) |
| void | stateCalcAirspeed_f (void) |
| static bool | stateIsWindspeedValid (void) |
| test if wind speed is available. | |
| static bool | stateIsVerticalWindspeedValid (void) |
| test if vertical wind speed is available. | |
| static bool | stateIsAirspeedValid (void) |
| test if air speed is available. | |
| static bool | stateIsAngleOfAttackValid (void) |
| test if angle of attack is available. | |
| static bool | stateIsSideslipValid (void) |
| test if sideslip is available. | |
| static void | stateSetHorizontalWindspeed_i (uint16_t id, struct Int32Vect2 *h_windspeed) |
| Set horizontal windspeed (int). | |
| static void | stateSetVerticalWindspeed_i (uint16_t id, int32_t v_windspeed) |
| Set vertical windspeed (int). | |
| static void | stateSetAirspeed_i (uint16_t id, int32_t airspeed) |
| Set airspeed (int). | |
| static void | stateSetHorizontalWindspeed_f (uint16_t id, struct FloatVect2 *h_windspeed) |
| Set horizontal windspeed (float). | |
| static void | stateSetVerticalWindspeed_f (uint16_t id, float v_windspeed) |
| Set vertical windspeed (float). | |
| static void | stateSetAirspeed_f (uint16_t id, float airspeed) |
| Set airspeed (float). | |
| static void | stateSetAngleOfAttack_f (uint16_t id, float aoa) |
| Set angle of attack in radians (float). | |
| static void | stateSetSideslip_f (uint16_t id, float sideslip) |
| Set sideslip angle in radians (float). | |
| static struct Int32Vect2 * | stateGetHorizontalWindspeed_i (void) |
| Get horizontal windspeed (int). | |
| static float | stateGetVerticalWindspeed_i (void) |
| Get vertical windspeed (int). | |
| static struct Int32Vect3 * | stateGetWindspeed_i (void) |
| Get windspeed (int). | |
| static int32_t | stateGetAirspeed_i (void) |
| Get airspeed (int). | |
| static struct FloatVect2 * | stateGetHorizontalWindspeed_f (void) |
| Get horizontal windspeed (float). | |
| static float | stateGetVerticalWindspeed_f (void) |
| Get vertical windspeed (float). | |
| static struct FloatVect3 * | stateGetWindspeed_f (void) |
| Get windspeed (float). | |
| static float | stateGetAirspeed_f (void) |
| Get airspeed (float). | |
| static float | stateGetAngleOfAttack_f (void) |
| Get angle of attack (float). | |
| static float | stateGetSideslip_f (void) |
| Get sideslip (float). | |
Variables | |
| struct State | state |
API to get/set the generic vehicle states.
Also see the State Interface page.
Definition in file state.h.