|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
 Collaboration diagram for Acceleration representations:
Collaboration diagram for Acceleration representations:Macros | |
| #define | ACCEL_ECEF_I 0 |
| #define | ACCEL_NED_I 1 |
| #define | ACCEL_ECEF_F 2 |
| #define | ACCEL_NED_F 3 |
Functions | |
| void | stateCalcAccelNed_i (void) |
| void | stateCalcAccelEcef_i (void) |
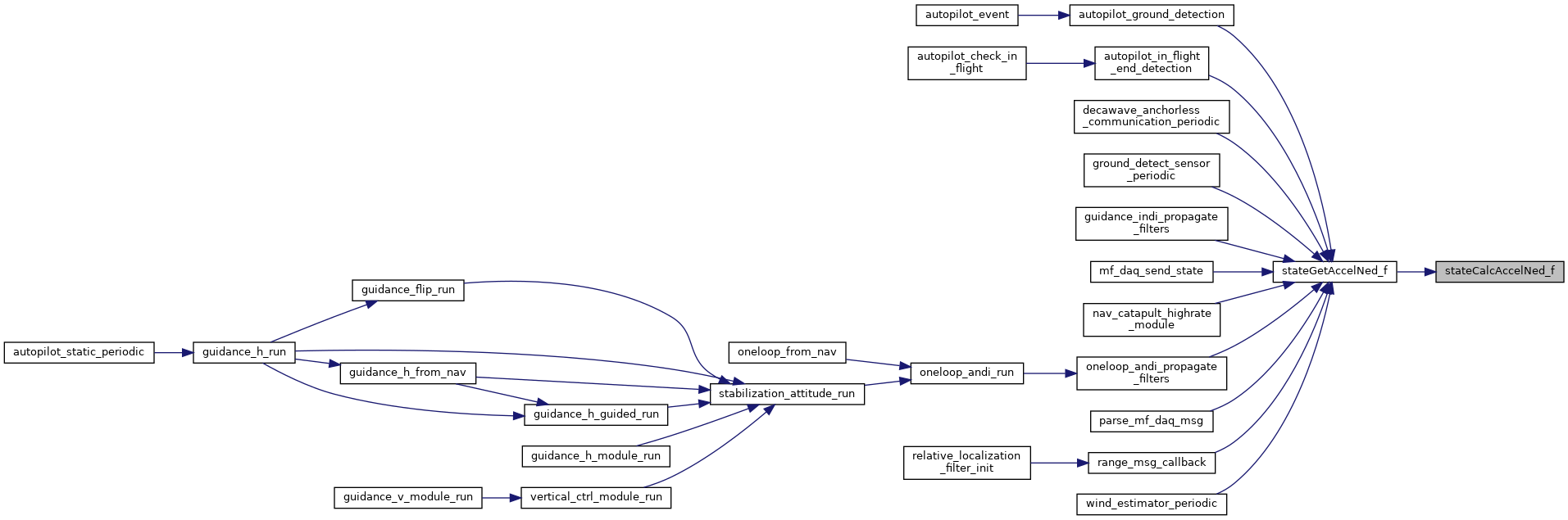
| void | stateCalcAccelNed_f (void) |
| void | stateCalcAccelEcef_f (void) |
| static bool | stateIsAccelValid (void) |
| Test if accelerations are valid. | |
| static void | stateSetAccelNed_i (uint16_t id, struct NedCoor_i *ned_accel) |
| Set acceleration in NED coordinates (int). | |
| static void | stateSetAccelEcef_i (uint16_t id, struct EcefCoor_i *ecef_accel) |
| Set acceleration in ECEF coordinates (int). | |
| static void | stateSetAccelNed_f (uint16_t id, struct NedCoor_f *ned_accel) |
| Set acceleration in NED coordinates (float). | |
| static void | stateSetAccelEcef_f (uint16_t id, struct EcefCoor_f *ecef_accel) |
| Set acceleration in ECEF coordinates (float). | |
| static void | stateSetAccelBody_i (uint16_t id, struct Int32Vect3 *body_accel) |
| Set acceleration in Body coordinates (int). | |
| static struct NedCoor_i * | stateGetAccelNed_i (void) |
| Get acceleration in NED coordinates (int). | |
| static struct EcefCoor_i * | stateGetAccelEcef_i (void) |
| Get acceleration in ECEF coordinates (int). | |
| static struct NedCoor_f * | stateGetAccelNed_f (void) |
| Get acceleration in NED coordinates (float). | |
| static struct EcefCoor_f * | stateGetAccelEcef_f (void) |
| Get acceleration in ECEF coordinates (float). | |
Variables | |
| uint8_t | State::accel_status |
| Holds the status bits for all acceleration representations. | |
| uint16_t | State::accel_input_filter |
| Holds the input filter id for acceleration. | |
| struct Int32Vect3 | State::body_accel_i |
| Acceleration in Body coordinates. | |
| struct NedCoor_i | State::ned_accel_i |
| Acceleration in North East Down coordinates. | |
| struct EcefCoor_i | State::ecef_accel_i |
| Acceleration in EarthCenteredEarthFixed coordinates. | |
| struct NedCoor_f | State::ned_accel_f |
| Acceleration in North East Down coordinates. | |
| struct EcefCoor_f | State::ecef_accel_f |
| Acceleration in EarthCenteredEarthFixed coordinates. | |
Definition at line 1315 of file state.c.
References ACCEL_ECEF_F, ACCEL_ECEF_I, ACCEL_NED_F, ACCEL_NED_I, State::accel_status, ACCELS_FLOAT_OF_BFP, State::ecef_accel_f, ecef_of_ned_vect_f(), foo, State::ned_accel_f, State::ned_accel_i, State::ned_initialized_f, State::ned_origin_f, and state.
Referenced by stateGetAccelEcef_f().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1250 of file state.c.
References ACCEL_ECEF_F, ACCEL_ECEF_I, ACCEL_NED_F, ACCEL_NED_I, State::accel_status, ACCELS_BFP_OF_REAL, State::ecef_accel_f, State::ecef_accel_i, ecef_of_ned_vect_i(), foo, State::ned_accel_f, State::ned_accel_i, State::ned_initialized_i, State::ned_origin_i, and state.
Referenced by stateGetAccelEcef_i().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1282 of file state.c.
References ACCEL_ECEF_F, ACCEL_ECEF_I, ACCEL_NED_F, ACCEL_NED_I, State::accel_status, ACCELS_FLOAT_OF_BFP, State::ecef_accel_f, State::ecef_accel_i, foo, State::ned_accel_f, State::ned_accel_i, State::ned_initialized_f, ned_of_ecef_vect_f(), State::ned_origin_f, and state.
Referenced by stateGetAccelNed_f().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 1217 of file state.c.
References ACCEL_ECEF_F, ACCEL_ECEF_I, ACCEL_NED_F, ACCEL_NED_I, State::accel_status, ACCELS_BFP_OF_REAL, State::ecef_accel_f, State::ecef_accel_i, foo, State::ned_accel_f, State::ned_accel_i, State::ned_initialized_i, ned_of_ecef_vect_i(), State::ned_origin_i, and state.
Referenced by stateGetAccelNed_i().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get acceleration in ECEF coordinates (float).
Definition at line 1212 of file state.h.
References ACCEL_ECEF_F, State::accel_status, State::ecef_accel_f, foo, state, and stateCalcAccelEcef_f().
Here is the call graph for this function:
|
inlinestatic |
Get acceleration in ECEF coordinates (int).
Definition at line 1194 of file state.h.
References ACCEL_ECEF_I, State::accel_status, State::ecef_accel_i, foo, state, and stateCalcAccelEcef_i().
Here is the call graph for this function:Get acceleration in NED coordinates (float).
Definition at line 1203 of file state.h.
References ACCEL_NED_F, State::accel_status, foo, State::ned_accel_f, state, and stateCalcAccelNed_f().
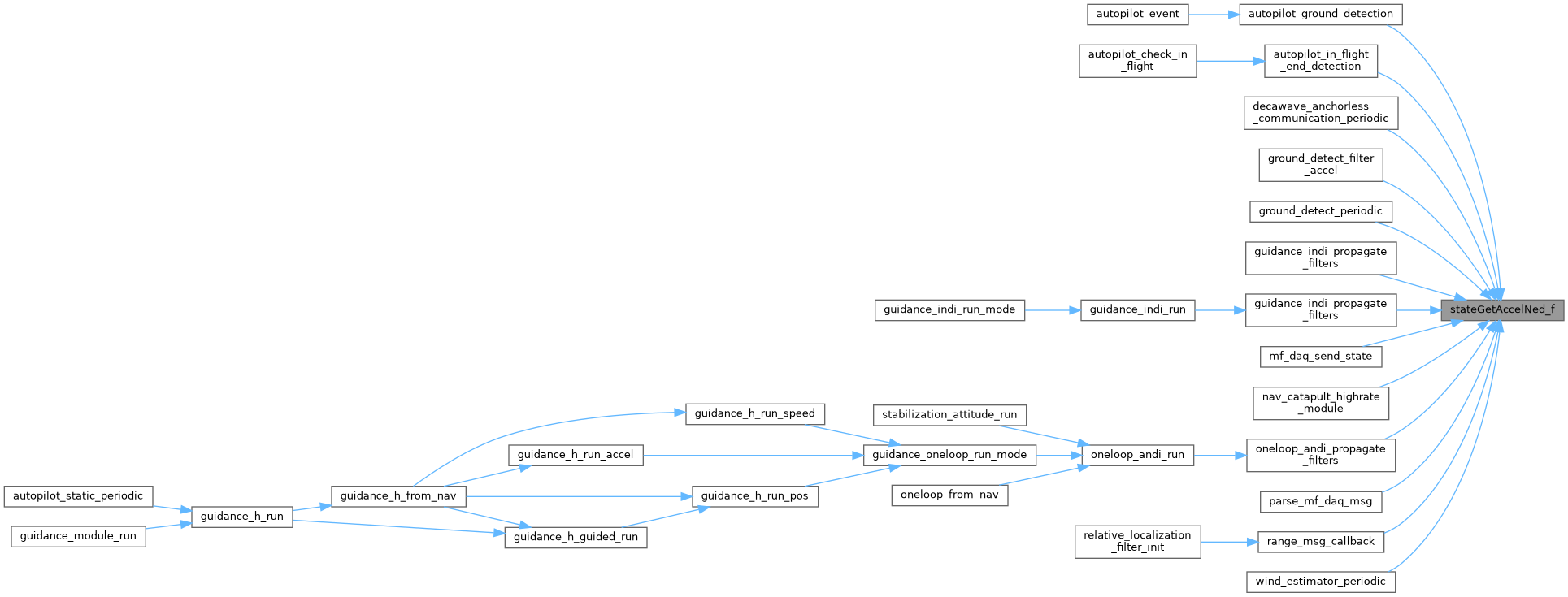
Referenced by autopilot_ground_detection(), autopilot_in_flight_end_detection(), decawave_anchorless_communication_periodic(), ground_detect_filter_accel(), guidance_indi_propagate_filters(), guidance_indi_propagate_filters(), mf_daq_send_state(), nav_catapult_highrate_module(), oneloop_andi_propagate_filters(), parse_mf_daq_msg(), range_msg_callback(), and wind_estimator_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Get acceleration in NED coordinates (int).
Definition at line 1185 of file state.h.
References ACCEL_NED_I, State::accel_status, foo, State::ned_accel_i, state, and stateCalcAccelNed_i().
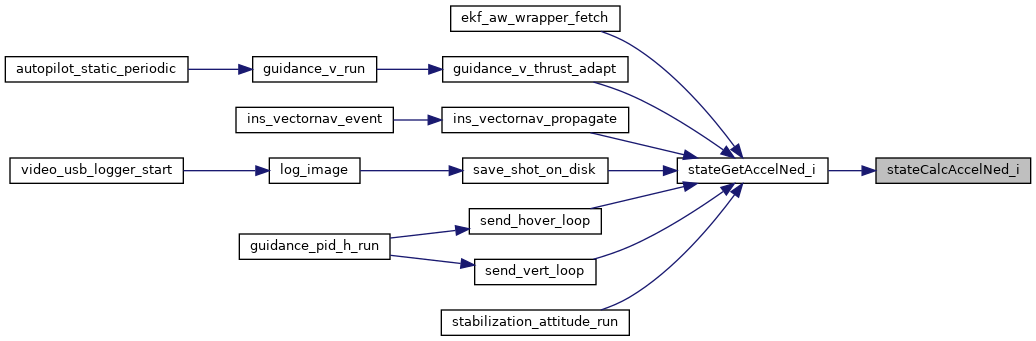
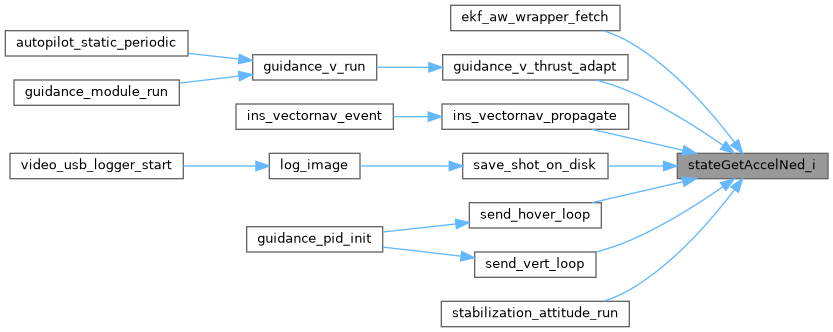
Referenced by ekf_aw_wrapper_fetch(), guidance_v_thrust_adapt(), ins_vectornav_propagate(), save_shot_on_disk(), send_hover_loop(), send_vert_loop(), and stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:Test if accelerations are valid.
Definition at line 1127 of file state.h.
References State::accel_status, and state.
|
inlinestatic |
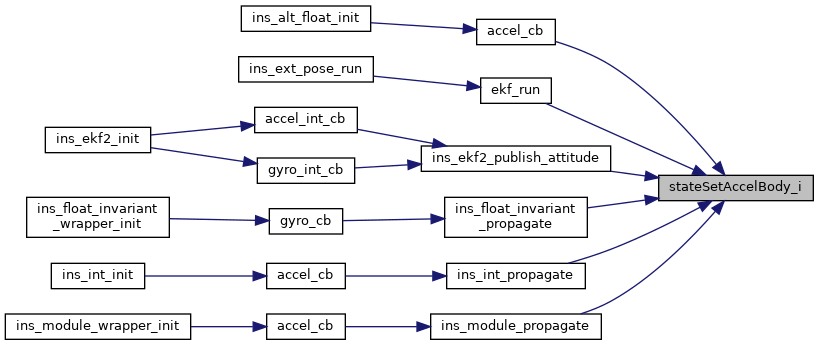
Set acceleration in Body coordinates (int).
Definition at line 1175 of file state.h.
References State::accel_input_filter, State::body_accel_i, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
Referenced by accel_cb(), accel_cb(), ekf_run(), ins_ekf2_publish_attitude(), ins_float_invariant_propagate(), ins_int_propagate(), and ins_module_propagate().
Here is the caller graph for this function:
|
inlinestatic |
Set acceleration in ECEF coordinates (float).
Definition at line 1165 of file state.h.
References ACCEL_ECEF_F, State::accel_input_filter, State::accel_status, State::ecef_accel_f, foo, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
|
inlinestatic |
Set acceleration in ECEF coordinates (int).
Definition at line 1145 of file state.h.
References ACCEL_ECEF_I, State::accel_input_filter, State::accel_status, State::ecef_accel_i, foo, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
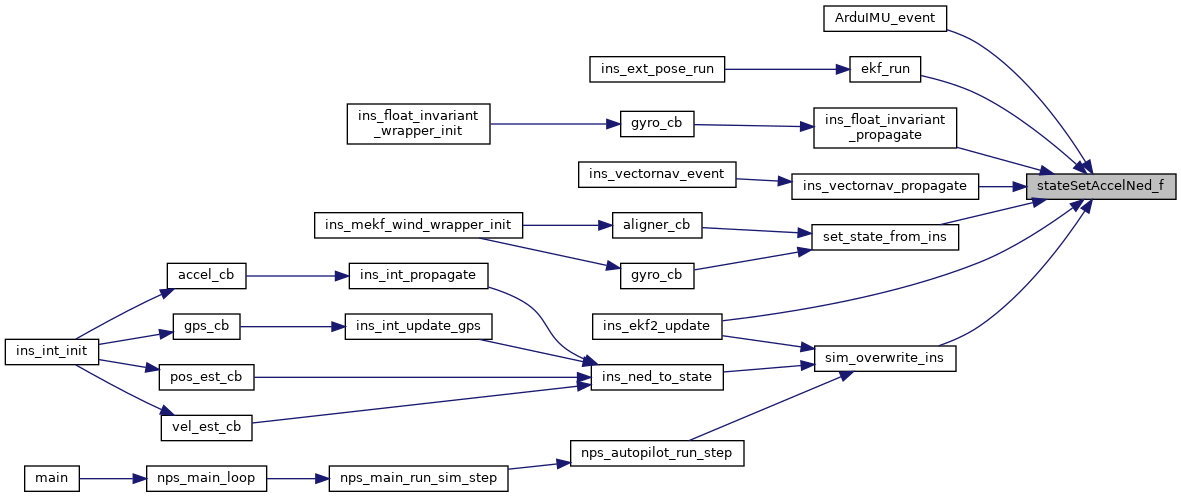
Set acceleration in NED coordinates (float).
Definition at line 1155 of file state.h.
References State::accel_input_filter, ACCEL_NED_F, State::accel_status, foo, State::ned_accel_f, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
Referenced by ArduIMU_event(), ekf_run(), ins_ekf2_update(), ins_float_invariant_propagate(), ins_vectornav_propagate(), set_state_from_ins(), and sim_overwrite_ins().
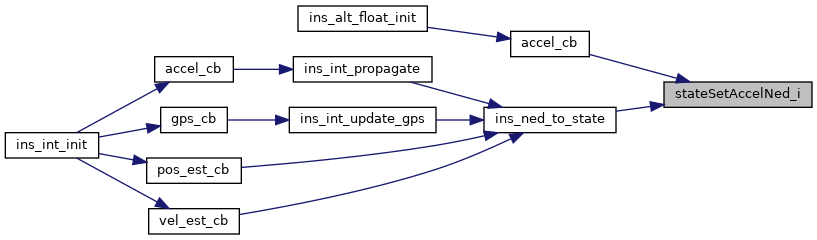
Here is the caller graph for this function:Set acceleration in NED coordinates (int).
Definition at line 1135 of file state.h.
References State::accel_input_filter, ACCEL_NED_I, State::accel_status, foo, State::ned_accel_i, state, STATE_CHECK_INPUT_AND_RETURN, and VECT3_COPY.
Referenced by accel_cb(), accel_cb(), ins_ned_to_state(), and ins_ned_to_state().
Here is the caller graph for this function:| uint16_t State::accel_input_filter |
Holds the input filter id for acceleration.
Definition at line 370 of file state.h.
Referenced by stateInit(), stateSetAccelBody_i(), stateSetAccelEcef_f(), stateSetAccelEcef_i(), stateSetAccelNed_f(), stateSetAccelNed_i(), and stateSetInputFilter().
| uint8_t State::accel_status |
Holds the status bits for all acceleration representations.
When the corresponding bit is one the representation is already computed.
Definition at line 365 of file state.h.
Referenced by stateCalcAccelEcef_f(), stateCalcAccelEcef_i(), stateCalcAccelNed_f(), stateCalcAccelNed_i(), stateGetAccelEcef_f(), stateGetAccelEcef_i(), stateGetAccelNed_f(), stateGetAccelNed_i(), stateInit(), stateIsAccelValid(), stateSetAccelEcef_f(), stateSetAccelEcef_i(), stateSetAccelNed_f(), stateSetAccelNed_i(), stateSetLocalOrigin_i(), and stateSetLocalUtmOrigin_f().
| struct Int32Vect3 State::body_accel_i |
Acceleration in Body coordinates.
Units: m/s^2 in BFP with INT32_ACCEL_FRAC
Definition at line 376 of file state.h.
Referenced by stateGetAccelBody_f(), stateGetAccelBody_i(), and stateSetAccelBody_i().
| struct EcefCoor_f State::ecef_accel_f |
Acceleration in EarthCenteredEarthFixed coordinates.
Units: m/s^2
Definition at line 400 of file state.h.
Referenced by stateCalcAccelEcef_f(), stateCalcAccelEcef_i(), stateCalcAccelNed_f(), stateCalcAccelNed_i(), stateGetAccelEcef_f(), and stateSetAccelEcef_f().
| struct EcefCoor_i State::ecef_accel_i |
Acceleration in EarthCenteredEarthFixed coordinates.
Units: m/s^2 in BFP with INT32_ACCEL_FRAC
Definition at line 388 of file state.h.
Referenced by stateCalcAccelEcef_i(), stateCalcAccelNed_f(), stateCalcAccelNed_i(), stateGetAccelEcef_i(), and stateSetAccelEcef_i().
| struct NedCoor_f State::ned_accel_f |
Acceleration in North East Down coordinates.
Units: m/s^2
Definition at line 394 of file state.h.
Referenced by stateCalcAccelEcef_f(), stateCalcAccelEcef_i(), stateCalcAccelNed_f(), stateCalcAccelNed_i(), stateGetAccelNed_f(), and stateSetAccelNed_f().
| struct NedCoor_i State::ned_accel_i |
Acceleration in North East Down coordinates.
Units: m/s^2 in BFP with INT32_ACCEL_FRAC
Definition at line 382 of file state.h.
Referenced by stateCalcAccelEcef_f(), stateCalcAccelEcef_i(), stateCalcAccelNed_f(), stateCalcAccelNed_i(), stateGetAccelNed_i(), and stateSetAccelNed_i().