|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Range sensor on the uavcan bus. More...
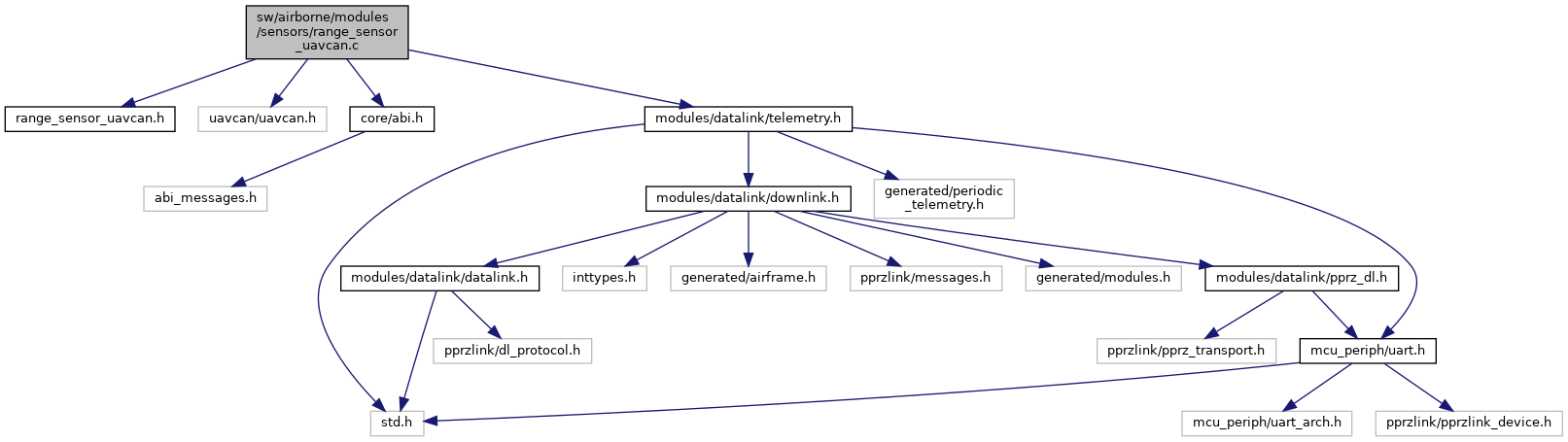
#include "range_sensor_uavcan.h"#include "uavcan/uavcan.h"#include "core/abi.h"#include "uavcan.equipment.range_sensor.Measurement.h"#include "modules/datalink/telemetry.h" Include dependency graph for range_sensor_uavcan.c:
Include dependency graph for range_sensor_uavcan.c:Go to the source code of this file.
Functions | |
| static void | range_sensor_uavcan_send_lidar (struct transport_tx *trans, struct link_device *dev) |
| static void | range_sensor_uavcan_cb (struct uavcan_iface_t *iface, CanardRxTransfer *transfer) |
| void | range_sensor_uavcan_init (void) |
Variables | |
| static struct uavcan_equipment_range_sensor_Measurement | range_sensor_uavcan = {0} |
| static uavcan_event | range_sensor_uavcan_ev |
Range sensor on the uavcan bus.
Definition in file range_sensor_uavcan.c.
|
static |
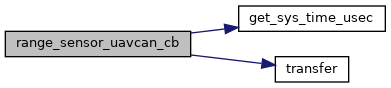
Definition at line 50 of file range_sensor_uavcan.c.
References AGL_UAVCAN_ID, foo, get_sys_time_usec(), range_sensor_uavcan, and transfer().
Referenced by range_sensor_uavcan_init().
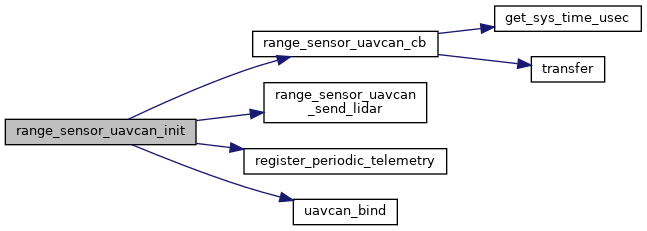
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 62 of file range_sensor_uavcan.c.
References DefaultPeriodic, foo, range_sensor_uavcan_cb(), range_sensor_uavcan_ev, range_sensor_uavcan_send_lidar(), register_periodic_telemetry(), and uavcan_bind().
Here is the call graph for this function:
|
static |
Definition at line 39 of file range_sensor_uavcan.c.
References dev, foo, and range_sensor_uavcan.
Referenced by range_sensor_uavcan_init().
Here is the caller graph for this function:
|
static |
Definition at line 33 of file range_sensor_uavcan.c.
Referenced by range_sensor_uavcan_cb(), and range_sensor_uavcan_send_lidar().
|
static |
Definition at line 34 of file range_sensor_uavcan.c.
Referenced by range_sensor_uavcan_init().