|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
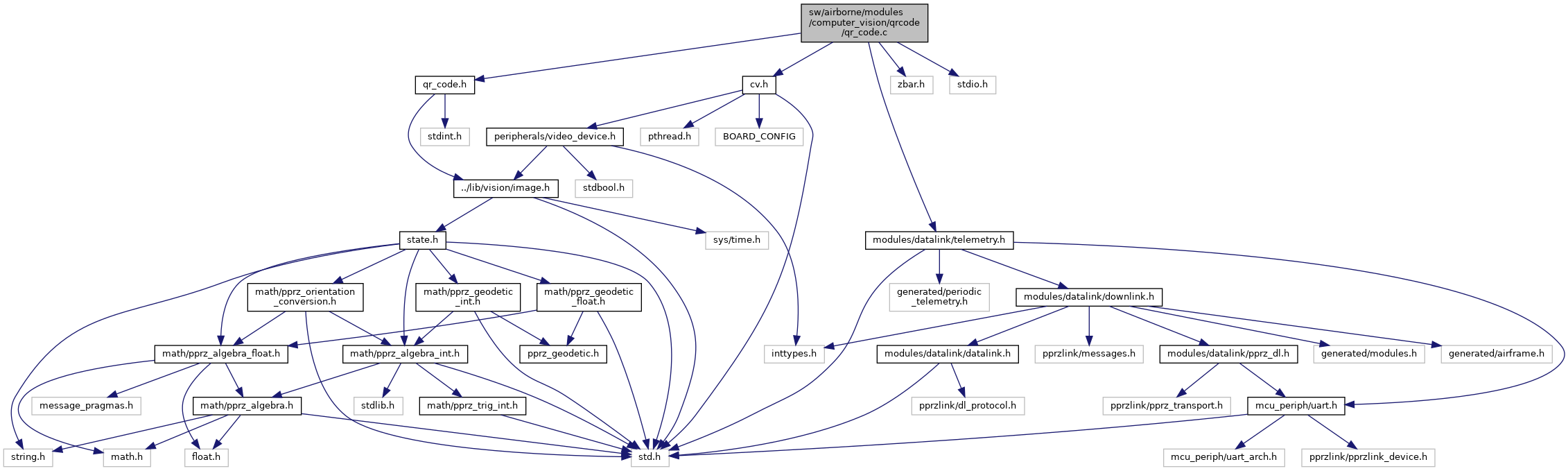
#include "qr_code.h"#include "cv.h"#include "zbar.h"#include <stdio.h>#include "modules/datalink/telemetry.h" Include dependency graph for qr_code.c:
Include dependency graph for qr_code.c:Go to the source code of this file.
Macros | |
| #define | QRCODE_DRAW_RECTANGLE FALSE |
| #define | QRCODE_FPS 0 |
| Default FPS (zero means run at camera fps) | |
Functions | |
| void | qrcode_init (void) |
| struct image_t * | qrscan (struct image_t *img, uint8_t camera_id) |
Variables | |
| bool | drawRectangleAroundQRCode = QRCODE_DRAW_RECTANGLE |
| zbar_image_scanner_t * | scanner = 0 |
| #define QRCODE_FPS 0 |
Definition at line 42 of file qr_code.c.
References cv_add_to_device(), foo, QRCODE_FPS, and qrscan().
Here is the call graph for this function:Definition at line 54 of file qr_code.c.
References DefaultChannel, DefaultDevice, drawRectangleAroundQRCode, foo, image_create(), image_draw_line(), IMAGE_GRAYSCALE, scanner, point_t::x, and point_t::y.
Referenced by qrcode_init().
Here is the call graph for this function: Here is the caller graph for this function:| bool drawRectangleAroundQRCode = QRCODE_DRAW_RECTANGLE |
| zbar_image_scanner_t* scanner = 0 |