|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
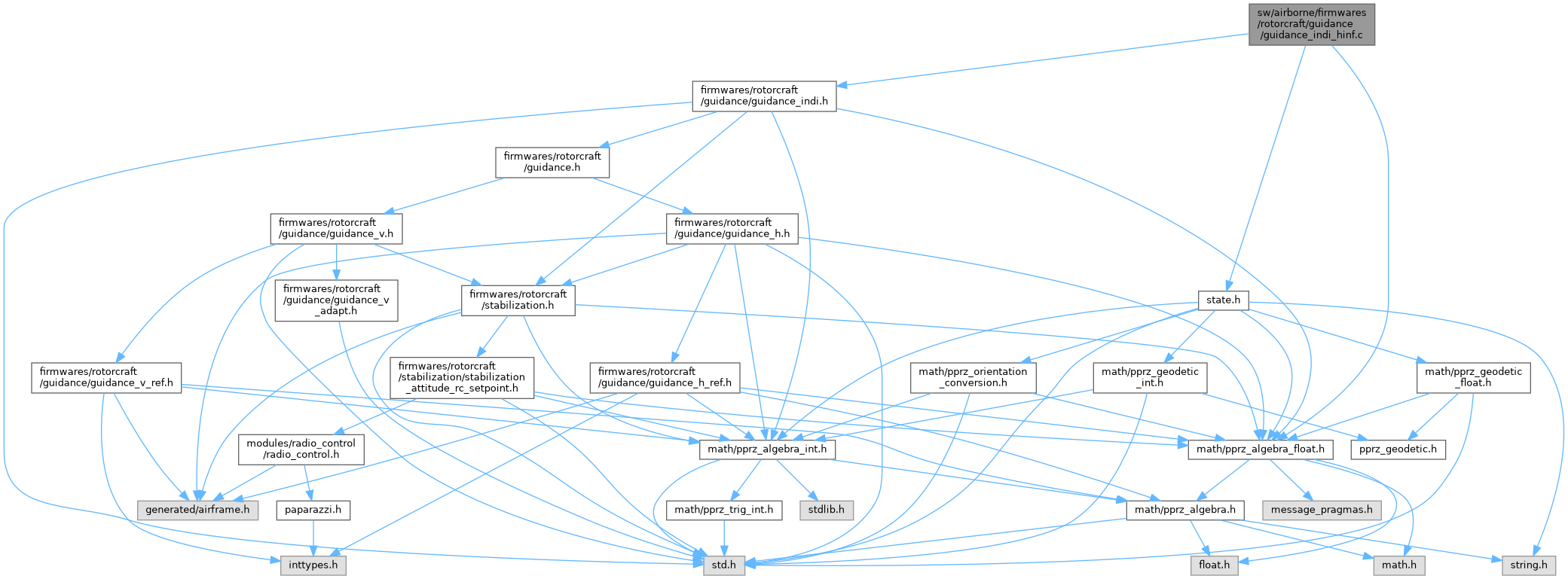
#include "firmwares/rotorcraft/guidance/guidance_indi.h"#include "math/pprz_algebra_float.h"#include "state.h" Include dependency graph for guidance_indi_hinf.c:
Include dependency graph for guidance_indi_hinf.c:Go to the source code of this file.
Functions | |
| struct FloatVect3 | guidance_indi_controller (bool in_flight, struct HorizontalGuidance *gh, struct VerticalGuidance *gv, enum GuidanceIndi_HMode h_mode, enum GuidanceIndi_VMode v_mode) |
| Acceleration controller based Hinfinity. | |
| struct FloatVect3 guidance_indi_controller | ( | bool in_flight | , |
| struct HorizontalGuidance * | gh, | ||
| struct VerticalGuidance * | gv, | ||
| enum GuidanceIndi_HMode | h_mode, | ||
| enum GuidanceIndi_VMode | v_mode | ||
| ) |
Acceleration controller based Hinfinity.
Definition at line 51 of file guidance_indi_hinf.c.
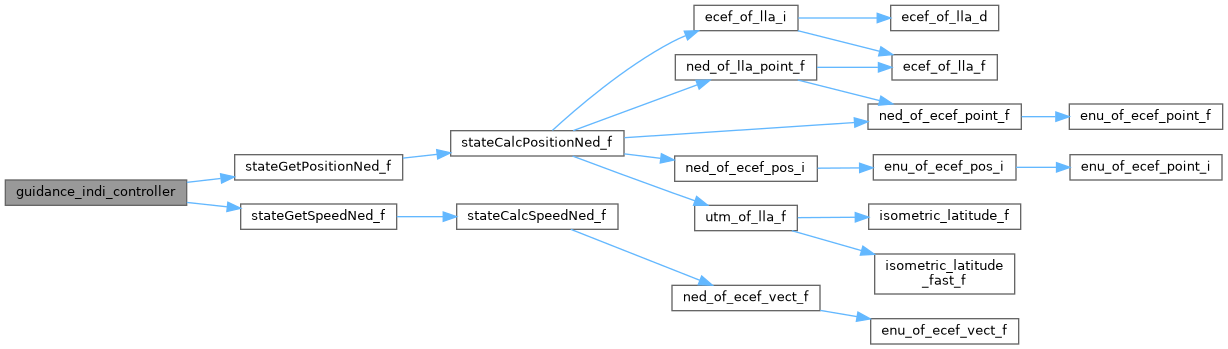
References Ad, Adz, Ap, Apz, Bd, Bdz, Bp, Bpz, Cd, Cdz, Cp, Cpz, Dd, Ddz, Dp, Dpz, FLOAT_VECT3_ZERO, foo, GUIDANCE_INDI_H_ACCEL, GUIDANCE_INDI_H_SPEED, GUIDANCE_INDI_V_ACCEL, GUIDANCE_INDI_V_SPEED, POS_FLOAT_OF_BFP, pos_state, SPEED_FLOAT_OF_BFP, speed_sp, speed_state, stateGetPositionNed_f(), stateGetSpeedNed_f(), FloatVect3::x, NedCoor_f::x, FloatVect3::y, NedCoor_f::y, FloatVect3::z, and NedCoor_f::z.
Here is the call graph for this function:
|
static |
Definition at line 31 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller(), and stabilization_indi_rate_controller().
|
static |
Definition at line 41 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().
|
static |
Definition at line 26 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller(), and stabilization_indi_attitude_controller().
|
static |
Definition at line 36 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().
|
static |
Definition at line 32 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller(), and stabilization_indi_rate_controller().
|
static |
Definition at line 42 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().
|
static |
Definition at line 27 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller(), and stabilization_indi_attitude_controller().
|
static |
Definition at line 37 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().
|
static |
Definition at line 33 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller(), and stabilization_indi_rate_controller().
|
static |
Definition at line 43 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().
|
static |
Definition at line 28 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller(), and stabilization_indi_attitude_controller().
|
static |
Definition at line 38 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().
|
static |
Definition at line 34 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller(), and stabilization_indi_rate_controller().
|
static |
Definition at line 44 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().
|
static |
Definition at line 29 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller(), and stabilization_indi_attitude_controller().
|
static |
Definition at line 39 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().
|
static |
Definition at line 46 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().
|
static |
Definition at line 47 of file guidance_indi_hinf.c.
Referenced by guidance_indi_controller().