|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Interpolation of control effectivenss matrix of the Falcon hybrid plane. More...
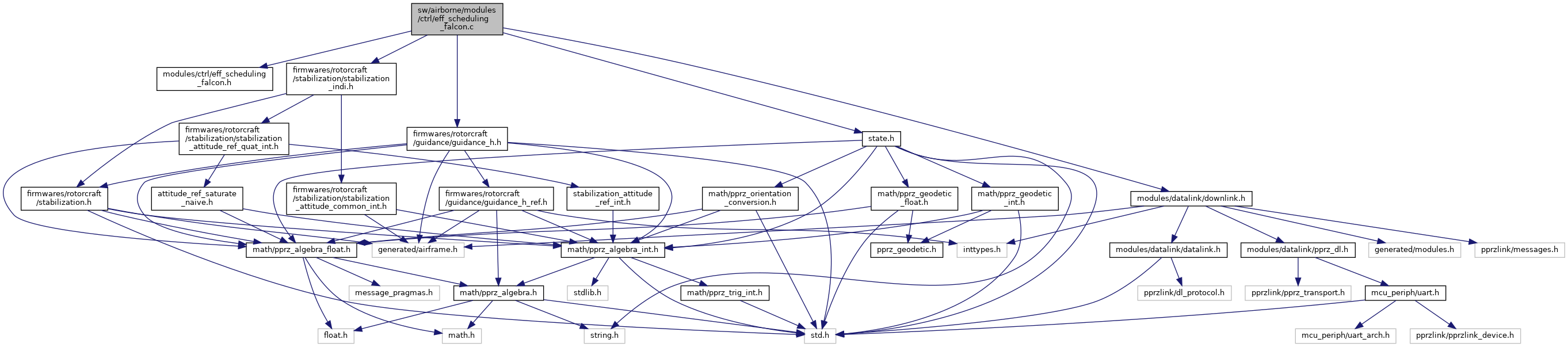
#include "modules/ctrl/eff_scheduling_falcon.h"#include "firmwares/rotorcraft/stabilization/stabilization_indi.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "state.h"#include "modules/datalink/downlink.h" Include dependency graph for eff_scheduling_falcon.c:
Include dependency graph for eff_scheduling_falcon.c:Go to the source code of this file.
Macros | |
| #define | EFF_SCHEDULING_FALCON_LOW_AIRSPEED 8.0f |
Functions | |
| void | eff_scheduling_falcon_init (void) |
| void | eff_scheduling_falcon_periodic (void) |
| void | eff_scheduling_falcon_report (void) |
Variables | |
| static float | g1g2_hover [INDI_OUTPUTS][INDI_NUM_ACT] |
Interpolation of control effectivenss matrix of the Falcon hybrid plane.
Definition in file eff_scheduling_falcon.c.
| #define EFF_SCHEDULING_FALCON_LOW_AIRSPEED 8.0f |
Definition at line 35 of file eff_scheduling_falcon.c.
Definition at line 49 of file eff_scheduling_falcon.c.
References foo, g1g2, g1g2_hover, and INDI_G_SCALING.
Definition at line 58 of file eff_scheduling_falcon.c.
References EFF_SCHEDULING_FALCON_LOW_AIRSPEED, eulers_zxy, float_eulers_of_quat_zxy(), foo, g1g2, stateGetAirspeed_f(), stateGetNedToBodyQuat_f(), FloatEulers::theta, and yaw_eff.
Here is the call graph for this function:Definition at line 113 of file eff_scheduling_falcon.c.
References DefaultChannel, DefaultDevice, f, foo, and g1g2.
|
static |
Definition at line 41 of file eff_scheduling_falcon.c.
Referenced by eff_scheduling_falcon_init().