|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h"#include <stdint.h> Include dependency graph for cv_georeference.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for cv_georeference.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | camera_frame_t |
Functions | |
| void | georeference_init (void) |
| void | georeference_run (void) |
| void | georeference_project (struct camera_frame_t *tar, int wp) |
| void | georeference_filter (bool kalman, int wp, int length) |
Variables | |
| int32_t | focus_length |
Definition in file cv_georeference.h.
| struct camera_frame_t |
Definition at line 119 of file cv_georeference.c.
References DefaultChannel, DefaultDevice, georeference_t::filter, foo, geo, h(), georeference_filter_t::P, georeference_filter_t::v, VECT3_ADD, VECT3_COPY, VECT3_SDIV, VECT3_SMUL, VECT3_SUB, waypoint_set_xy_i(), Int32Vect3::x, georeference_filter_t::x, georeference_t::x_t, and Int32Vect3::y.
Referenced by cv_blob_locator_event(), and georeference_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 180 of file cv_georeference.c.
References georeference_t::filter, focus_length, geo, INT32_VECT3_ZERO, georeference_filter_t::P, georeference_t::target_i, georeference_t::target_l, georeference_filter_t::v, VECT3_ASSIGN, georeference_filter_t::x, and georeference_t::x_t.
Referenced by cv_blob_locator_init(), cv_blob_locator_start(), start_vision(), start_vision_land(), and stop_vision().
Here is the caller graph for this function:| void georeference_project | ( | struct camera_frame_t * | tar, |
| int | wp | ||
| ) |
Definition at line 53 of file cv_georeference.c.
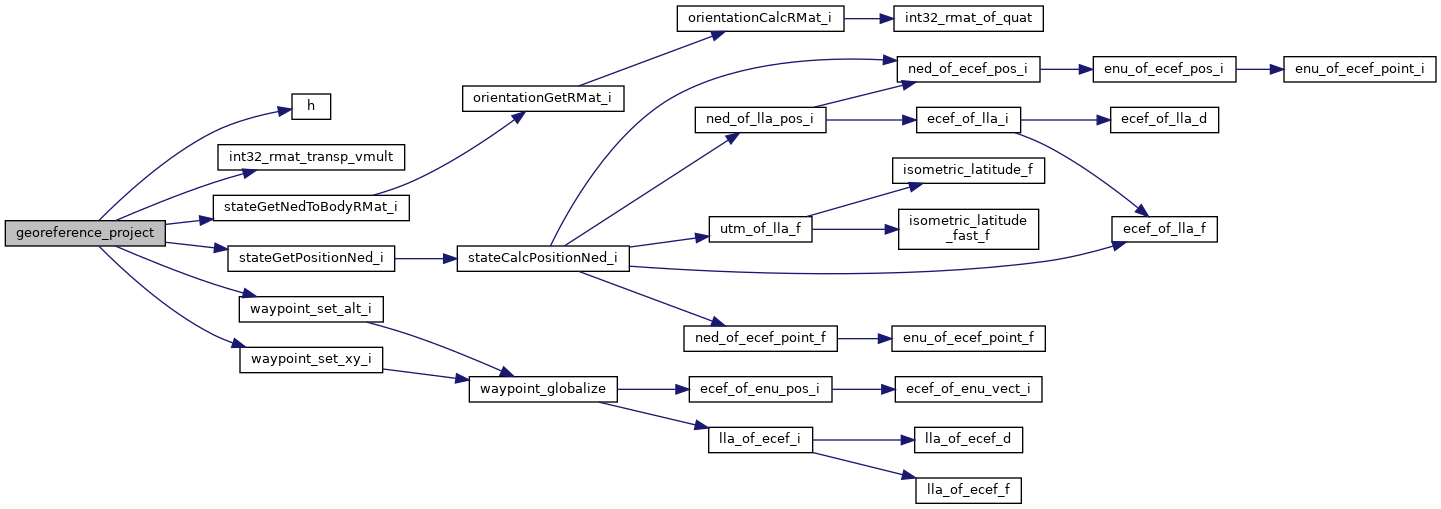
References DefaultChannel, DefaultDevice, foo, geo, h(), INT32_MAT33_ZERO, int32_rmat_transp_vmult(), INT32_TRIG_FRAC, INT32_VECT3_LSHIFT, MAT33_ELMT, stateGetNedToBodyRMat_i(), stateGetPositionNed_i(), georeference_t::target_i, georeference_t::target_l, VECT3_ASSIGN, waypoint_set_alt_i(), waypoint_set_xy_i(), Int32Vect3::x, NedCoor_i::x, georeference_t::x_t, Int32Vect3::y, NedCoor_i::y, Int32Vect3::z, and NedCoor_i::z.
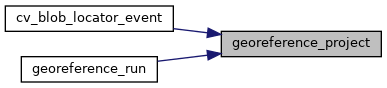
Referenced by cv_blob_locator_event(), and georeference_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 155 of file cv_georeference.c.
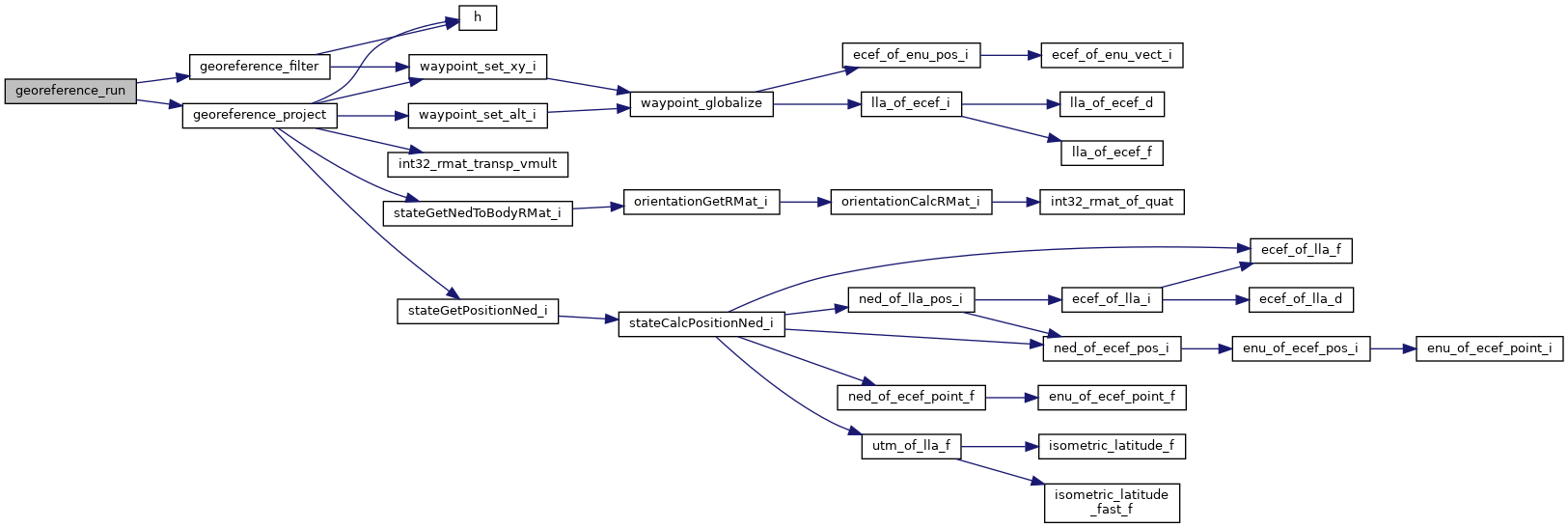
References FALSE, focus_length, foo, georeference_filter(), georeference_project(), and target.
Here is the call graph for this function:
|
extern |
Definition at line 153 of file cv_georeference.c.
Referenced by georeference_init(), and georeference_run().