|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h" Include dependency graph for follow_me.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for follow_me.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | follow_me_init (void) |
| init function | |
| void | follow_me_periodic (void) |
| periodic function | |
| void | follow_me_parse_target_pos (uint8_t *buf) |
| on receiving a TARGET_POS message | |
| void | follow_me_set_wp (uint8_t wp_id, float speed) |
| run function | |
Variables | |
| float | follow_me_distance |
| distance from the ground gps | |
| float | follow_me_height |
| height from the ground gps | |
| float | follow_me_heading |
| heading direction in which to hover from (automatically set if ground is exceeding speed) | |
| float | follow_me_filt |
| Follow me course sin/cos filter value (higher is harder filter) | |
| float | follow_me_diag_speed |
| Diagonal speed for follow me. | |
| float | follow_me_gps_delay |
| Follow me GPS delay from the relative positionb packet (in ms) | |
| float | follow_me_datalink_delay |
| Follow me datalink delay from the ground GPS packet (in ms) | |
| float | follow_me_advance_ms |
| Follow me waypoint advance time in ms (multiplied by the ground speed) | |
| float | follow_me_min_dist |
| Follow me minimum distance in meters when trying to approach with a certain speed. | |
| float | follow_me_min_height |
| Follow me minimum height in meters when approaching with a speed. | |
Definition in file follow_me.h.
init function
Definition at line 87 of file follow_me.c.
References ground_set, ground_time_msec, last_targetpos_valid, moving_wps, and moving_wps_cnt.
on receiving a TARGET_POS message
Definition at line 147 of file follow_me.c.
References LlaCoor_i::alt, foo, get_sys_time_msec(), ground_climb, ground_course, ground_heading, ground_lla, ground_set, ground_speed, ground_time_msec, LlaCoor_i::lat, and LlaCoor_i::lon.
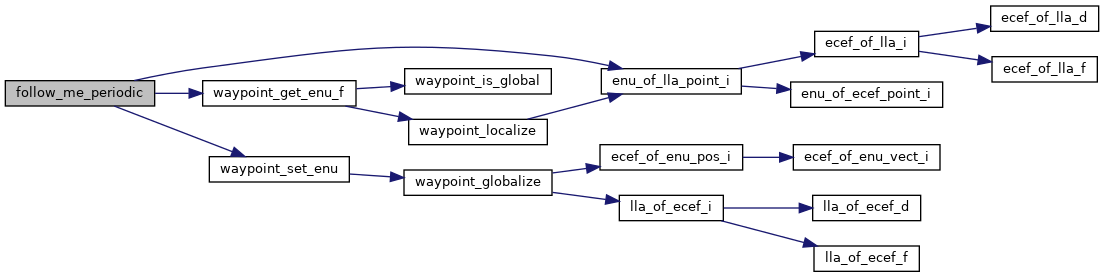
Here is the call graph for this function:periodic function
Definition at line 95 of file follow_me.c.
References DefaultChannel, DefaultDevice, enu_of_lla_point_i(), foo, ground_heading, ground_lla, ground_set, last_targetpos, last_targetpos_heading, last_targetpos_valid, moving_wps, moving_wps_cnt, stateGetNedOrigin_i(), VECT3_COPY, VECT3_DIFF, VECT3_FLOAT_OF_CM, waypoint_get_enu_f(), waypoint_set_enu(), waypoints, EnuCoor_f::x, point::x, and point::y.
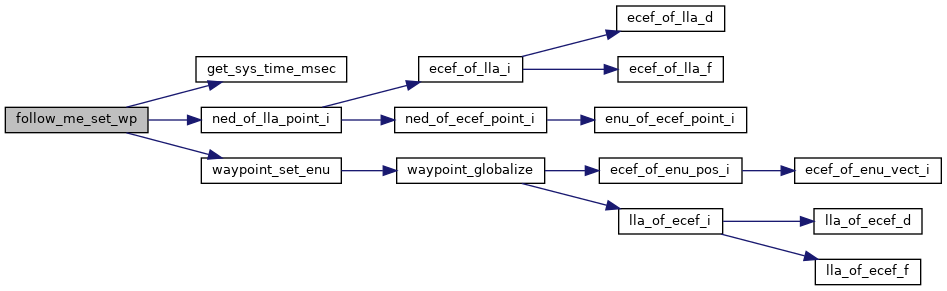
Here is the call graph for this function:run function
should be called in a flight plan stay block using pre_call will only set the x and y position and not the height
ex: <block name="Track Object"> <stay wp="STDBY" pre_call="object_tracking_run(WP_STDBY)"> </block>
Definition at line 170 of file follow_me.c.
References DefaultChannel, DefaultDevice, ENU_OF_TO_NED, follow_me_advance_ms, follow_me_datalink_delay, FOLLOW_ME_DISTANCE, follow_me_distance, follow_me_filt, FOLLOW_ME_GROUND_TIMEOUT, follow_me_heading, FOLLOW_ME_HEIGHT, follow_me_height, follow_me_min_dist, follow_me_min_height, foo, get_sys_time_msec(), ground_course, ground_heading, ground_lla, ground_set, ground_speed, ground_time_msec, State::ned_initialized_i, ned_of_lla_point_i(), state, stateGetNedOrigin_i(), waypoint_set_enu(), waypoints, NedCoor_f::x, point::x, NedCoor_f::y, point::y, and NedCoor_f::z.
Here is the call graph for this function:
|
extern |
Follow me waypoint advance time in ms (multiplied by the ground speed)
Definition at line 69 of file follow_me.c.
Referenced by follow_me_set_wp().
|
extern |
Follow me datalink delay from the ground GPS packet (in ms)
Definition at line 68 of file follow_me.c.
Referenced by follow_me_set_wp().
|
extern |
Diagonal speed for follow me.
Definition at line 66 of file follow_me.c.
|
extern |
distance from the ground gps
Definition at line 62 of file follow_me.c.
Referenced by follow_me_set_wp().
|
extern |
Follow me course sin/cos filter value (higher is harder filter)
Definition at line 65 of file follow_me.c.
Referenced by follow_me_set_wp().
|
extern |
Follow me GPS delay from the relative positionb packet (in ms)
Definition at line 67 of file follow_me.c.
|
extern |
heading direction in which to hover from (automatically set if ground is exceeding speed)
Definition at line 64 of file follow_me.c.
Referenced by follow_me_set_wp().
|
extern |
height from the ground gps
Definition at line 63 of file follow_me.c.
Referenced by follow_me_set_wp().
|
extern |
Follow me minimum distance in meters when trying to approach with a certain speed.
Definition at line 70 of file follow_me.c.
Referenced by follow_me_set_wp().
|
extern |
Follow me minimum height in meters when approaching with a speed.
Definition at line 71 of file follow_me.c.
Referenced by follow_me_set_wp().