|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
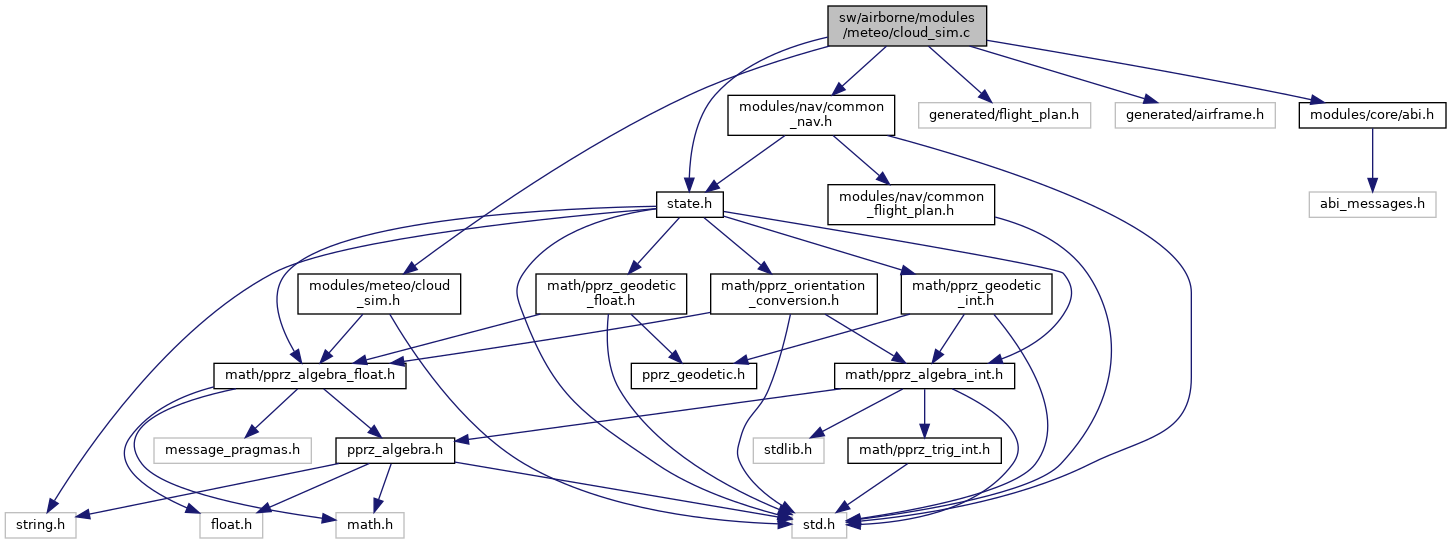
#include "modules/meteo/cloud_sim.h"#include "modules/nav/common_nav.h"#include "generated/flight_plan.h"#include "generated/airframe.h"#include "modules/core/abi.h"#include "state.h" Include dependency graph for cloud_sim.c:
Include dependency graph for cloud_sim.c:Go to the source code of this file.
Macros | |
| #define | CLOUD_SIM_RADIUS 150.f |
| #define | CLOUD_SIM_MODE CLOUD_SIM_WP |
| #define | CLOUD_SIM_WP_ID 0 |
| #define | CLOUD_SIM_WPS_NB 1 |
| #define | CLOUD_SIM_SPEED_X 0.f |
| #define | CLOUD_SIM_SPEED_Y 0.f |
Functions | |
| static float | distance_to_wp (struct EnuCoor_f *pos, uint8_t id) |
| void | cloud_sim_init (void) |
| void | cloud_sim_detect (void) |
| periodic call for border detection | |
| void | cloud_sim_move (void) |
| periodic call for moving waypoints | |
| void | cloud_sim_reset (bool reset) |
| reset handler | |
Variables | |
| static uint8_t | cloud_sim_circle_id = CLOUD_SIM_WP_ID |
| static uint8_t | cloud_sim_polygon [CLOUD_SIM_WPS_NB] = {0} |
| struct CloudSim | cloud_sim |
Definition in file cloud_sim.c.
| #define CLOUD_SIM_MODE CLOUD_SIM_WP |
Definition at line 40 of file cloud_sim.c.
Definition at line 35 of file cloud_sim.c.
Definition at line 65 of file cloud_sim.c.
Definition at line 69 of file cloud_sim.c.
| #define CLOUD_SIM_WP_ID 0 |
Definition at line 47 of file cloud_sim.c.
| #define CLOUD_SIM_WPS_NB 1 |
Definition at line 60 of file cloud_sim.c.
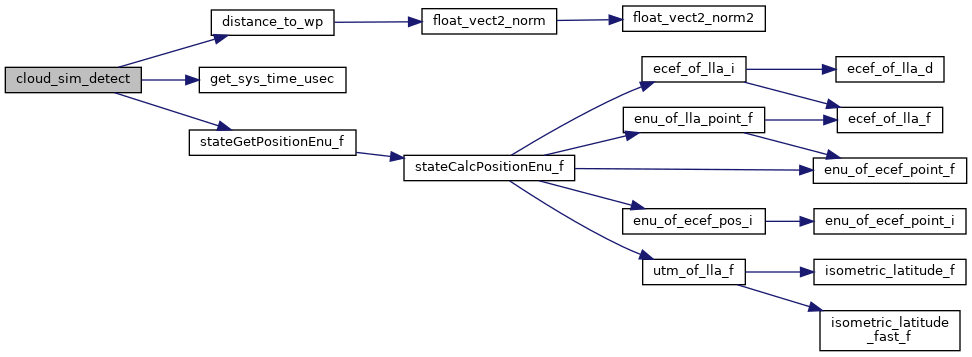
periodic call for border detection
Definition at line 102 of file cloud_sim.c.
References CLOUD_SENSOR_ID, cloud_sim, cloud_sim_circle_id, CLOUD_SIM_POLYGON, CLOUD_SIM_WP, distance_to_wp(), foo, get_sys_time_usec(), CloudSim::mode, CloudSim::radius, stateGetPositionEnu_f(), EnuCoor_f::x, and EnuCoor_f::y.
Here is the call graph for this function:Definition at line 92 of file cloud_sim.c.
References cloud_sim, CLOUD_SIM_MODE, CLOUD_SIM_RADIUS, CLOUD_SIM_SPEED_X, CLOUD_SIM_SPEED_Y, CloudSim::mode, CloudSim::radius, CloudSim::reset, CloudSim::speed, FloatVect2::x, and FloatVect2::y.
periodic call for moving waypoints
Definition at line 130 of file cloud_sim.c.
References cloud_sim, cloud_sim_circle_id, cloud_sim_polygon, CLOUD_SIM_POLYGON, CLOUD_SIM_WP, CLOUD_SIM_WPS_NB, foo, CloudSim::mode, nav_move_waypoint_point(), nav_send_waypoint(), CloudSim::speed, waypoints, FloatVect2::x, point::x, FloatVect2::y, and point::y.
Here is the call graph for this function:reset handler
Definition at line 154 of file cloud_sim.c.
References cloud_sim, cloud_sim_circle_id, cloud_sim_polygon, CLOUD_SIM_WPS_NB, foo, nav_move_waypoint_point(), nav_send_waypoint(), CloudSim::reset, and reset.
Here is the call graph for this function:Definition at line 78 of file cloud_sim.c.
References float_vect2_norm(), foo, nb_waypoint, waypoints, EnuCoor_f::x, point::x, EnuCoor_f::y, and point::y.
Referenced by cloud_sim_detect().
Here is the call graph for this function: Here is the caller graph for this function:| struct CloudSim cloud_sim |
Definition at line 72 of file cloud_sim.c.
Referenced by cloud_sim_detect(), cloud_sim_init(), cloud_sim_move(), and cloud_sim_reset().
|
static |
Definition at line 49 of file cloud_sim.c.
Referenced by cloud_sim_detect(), cloud_sim_move(), and cloud_sim_reset().
|
static |
Definition at line 61 of file cloud_sim.c.
Referenced by cloud_sim_move(), and cloud_sim_reset().