|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Complementary filter in float to estimate the attitude, heading and gyro bias. More...
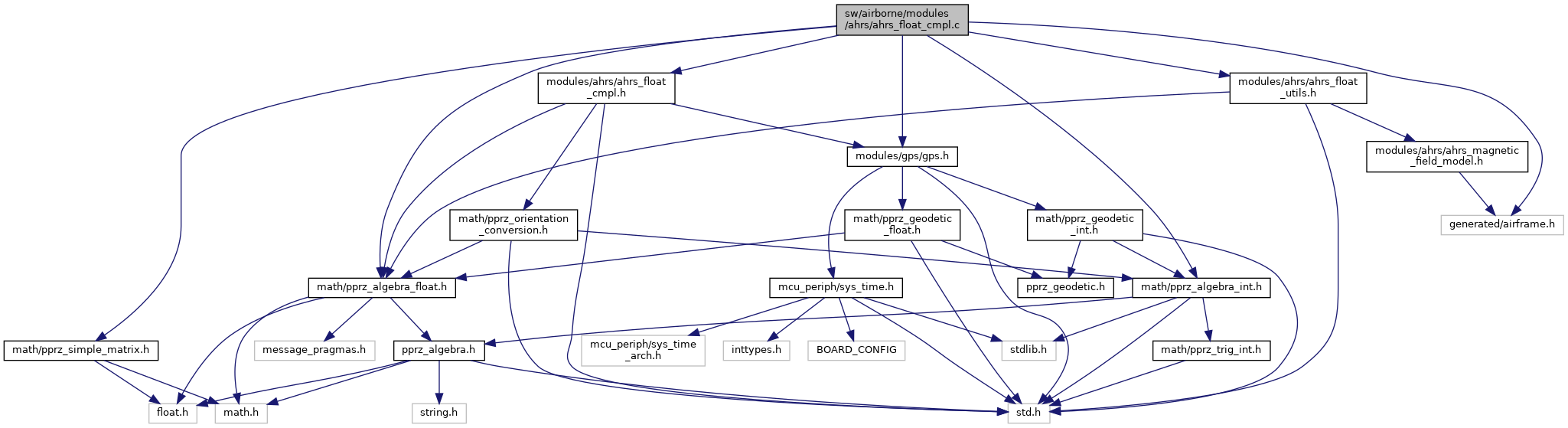
#include "modules/ahrs/ahrs_float_cmpl.h"#include "modules/ahrs/ahrs_float_utils.h"#include "math/pprz_algebra_float.h"#include "math/pprz_algebra_int.h"#include "math/pprz_simple_matrix.h"#include "generated/airframe.h"#include "modules/gps/gps.h" Include dependency graph for ahrs_float_cmpl.c:
Include dependency graph for ahrs_float_cmpl.c:Go to the source code of this file.
Macros | |
| #define | AHRS_ACCEL_OMEGA 0.063 |
| #define | AHRS_ACCEL_ZETA 0.9 |
| #define | AHRS_MAG_OMEGA 0.04 |
| #define | AHRS_MAG_ZETA 0.9 |
| #define | AHRS_GRAVITY_HEURISTIC_FACTOR 30 |
| by default use the gravity heuristic to reduce gain | |
| #define | FIR_FILTER_SIZE 8 |
Functions | |
| void | ahrs_fc_update_mag_full (struct FloatVect3 *mag, float dt) |
| void | ahrs_fc_update_mag_2d (struct FloatVect3 *mag, float dt) |
| void | ahrs_fc_update_mag_2d_dumb (struct FloatVect3 *mag) |
| void | ahrs_fc_init (void) |
| bool | ahrs_fc_align (struct FloatRates *lp_gyro, struct FloatVect3 *lp_accel, struct FloatVect3 *lp_mag) |
| void | ahrs_fc_propagate (struct FloatRates *gyro, float dt) |
| void | ahrs_fc_update_accel (struct FloatVect3 *accel, float dt) |
| void | ahrs_fc_update_mag (struct FloatVect3 *mag, float dt) |
| void | ahrs_fc_update_gps (struct GpsState *gps_s) |
| void | ahrs_fc_update_heading (float heading) |
| Update yaw based on a heading measurement. | |
| void | ahrs_fc_realign_heading (float heading) |
| Hard reset yaw to a heading. | |
Variables | |
| struct AhrsFloatCmpl | ahrs_fc |
Complementary filter in float to estimate the attitude, heading and gyro bias.
Propagation can be done in rotation matrix or quaternion representation.
Definition in file ahrs_float_cmpl.c.
| #define AHRS_ACCEL_OMEGA 0.063 |
Definition at line 57 of file ahrs_float_cmpl.c.
| #define AHRS_ACCEL_ZETA 0.9 |
Definition at line 60 of file ahrs_float_cmpl.c.
| #define AHRS_GRAVITY_HEURISTIC_FACTOR 30 |
by default use the gravity heuristic to reduce gain
Definition at line 72 of file ahrs_float_cmpl.c.
| #define AHRS_MAG_OMEGA 0.04 |
Definition at line 64 of file ahrs_float_cmpl.c.
| #define AHRS_MAG_ZETA 0.9 |
Definition at line 67 of file ahrs_float_cmpl.c.
| #define FIR_FILTER_SIZE 8 |
| bool ahrs_fc_align | ( | struct FloatRates * | lp_gyro, |
| struct FloatVect3 * | lp_accel, | ||
| struct FloatVect3 * | lp_mag | ||
| ) |
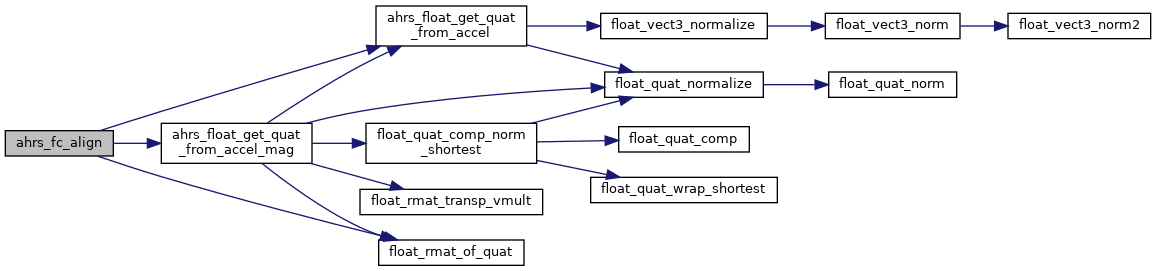
Definition at line 115 of file ahrs_float_cmpl.c.
References ahrs_fc, AHRS_FC_RUNNING, ahrs_float_get_quat_from_accel(), ahrs_float_get_quat_from_accel_mag(), float_rmat_of_quat(), AhrsFloatCmpl::gyro_bias, AhrsFloatCmpl::heading_aligned, AhrsFloatCmpl::is_aligned, AhrsFloatCmpl::ltp_to_body_quat, AhrsFloatCmpl::ltp_to_body_rmat, and AhrsFloatCmpl::status.
Referenced by aligner_cb().
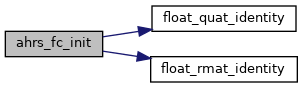
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 82 of file ahrs_float_cmpl.c.
References AhrsFloatCmpl::accel_cnt, AhrsFloatCmpl::accel_omega, AhrsFloatCmpl::accel_zeta, AHRS_ACCEL_OMEGA, AHRS_ACCEL_ZETA, ahrs_fc, AHRS_FC_UNINIT, AHRS_GRAVITY_HEURISTIC_FACTOR, AHRS_MAG_OMEGA, AHRS_MAG_ZETA, AhrsFloatCmpl::body_rate, AhrsFloatCmpl::correct_gravity, float_quat_identity(), FLOAT_RATES_ZERO, float_rmat_identity(), foo, AhrsFloatCmpl::gravity_heuristic_factor, AhrsFloatCmpl::heading_aligned, AhrsFloatCmpl::is_aligned, AhrsFloatCmpl::ltp_to_body_quat, AhrsFloatCmpl::ltp_to_body_rmat, AhrsFloatCmpl::ltp_vel_norm_valid, AhrsFloatCmpl::mag_cnt, AhrsFloatCmpl::mag_h, AhrsFloatCmpl::mag_omega, AhrsFloatCmpl::mag_zeta, AhrsFloatCmpl::status, and VECT3_ASSIGN.
Referenced by ahrs_fc_wrapper_init().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_fc_propagate | ( | struct FloatRates * | gyro, |
| float | dt | ||
| ) |
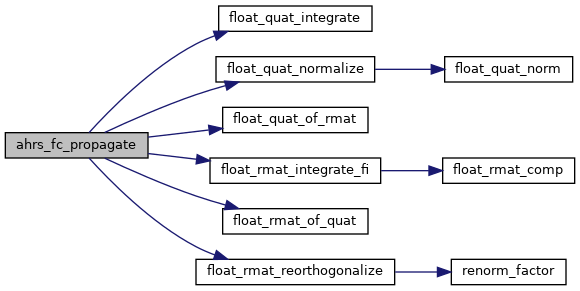
Definition at line 142 of file ahrs_float_cmpl.c.
References AhrsFloatCmpl::accel_cnt, ahrs_fc, alpha, AhrsFloatCmpl::body_rate, float_quat_integrate(), float_quat_normalize(), float_quat_of_rmat(), FLOAT_RATES_LIN_CMB, FLOAT_RATES_ZERO, float_rmat_integrate_fi(), float_rmat_of_quat(), float_rmat_reorthogonalize(), AhrsFloatCmpl::gyro_bias, AhrsFloatCmpl::ltp_to_body_quat, AhrsFloatCmpl::ltp_to_body_rmat, AhrsFloatCmpl::mag_cnt, AhrsFloatCmpl::rate_correction, RATES_COPY, RATES_SUB, and RATES_SUM.
Referenced by gyro_cb().
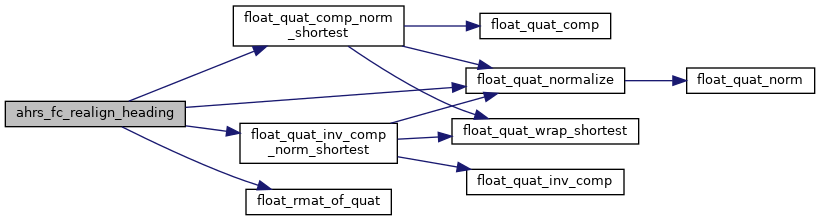
Here is the call graph for this function: Here is the caller graph for this function:Hard reset yaw to a heading.
Doesn't affect the bias. Sets ahrs_fc.heading_aligned to TRUE.
| heading | Heading in body frame, radians (CW/north) |
Definition at line 460 of file ahrs_float_cmpl.c.
References ahrs_fc, FLOAT_ANGLE_NORMALIZE, float_quat_comp_norm_shortest(), float_quat_inv_comp_norm_shortest(), float_quat_normalize(), float_rmat_of_quat(), foo, heading, AhrsFloatCmpl::heading_aligned, AhrsFloatCmpl::ltp_to_body_quat, AhrsFloatCmpl::ltp_to_body_rmat, QUAT_COPY, and FloatQuat::qx.
Referenced by ahrs_fc_update_gps().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_fc_update_accel | ( | struct FloatVect3 * | accel, |
| float | dt | ||
| ) |
Definition at line 178 of file ahrs_float_cmpl.c.
References AhrsFloatCmpl::accel_cnt, AhrsFloatCmpl::accel_omega, AhrsFloatCmpl::accel_zeta, ahrs_fc, AhrsFloatCmpl::body_rate, c2, AhrsFloatCmpl::correct_gravity, FIR_FILTER_SIZE, float_vect3_norm(), foo, AhrsFloatCmpl::gravity_heuristic_factor, AhrsFloatCmpl::gyro_bias, AhrsFloatCmpl::ltp_to_body_rmat, AhrsFloatCmpl::ltp_vel_norm, AhrsFloatCmpl::ltp_vel_norm_valid, AhrsFloatCmpl::rate_correction, RATES_ADD_SCALED_VECT, RMAT_ELMT, VECT3_ADD, VECT3_COPY, VECT3_CROSS_PRODUCT, VECT3_DIFF, VECT3_RATES_CROSS_VECT3, VECT3_SDIV, VECT3_SMUL, and AhrsFloatCmpl::weight.
Referenced by accel_cb().
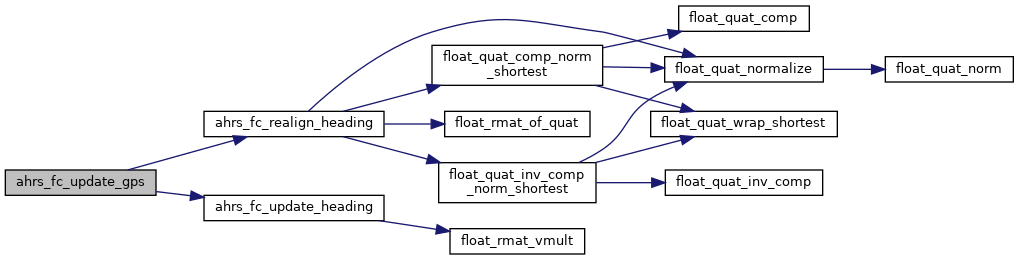
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 388 of file ahrs_float_cmpl.c.
References ahrs_fc, ahrs_fc_realign_heading(), ahrs_fc_update_heading(), course, foo, GPS_FIX_3D, AhrsFloatCmpl::heading_aligned, AhrsFloatCmpl::ltp_vel_norm, and AhrsFloatCmpl::ltp_vel_norm_valid.
Referenced by gps_cb().
Here is the call graph for this function: Here is the caller graph for this function:Update yaw based on a heading measurement.
e.g. from GPS course
| heading | Heading in body frame, radians (CW/north) |
Definition at line 419 of file ahrs_float_cmpl.c.
References ahrs_fc, FLOAT_ANGLE_NORMALIZE, float_rmat_vmult(), foo, AhrsFloatCmpl::gyro_bias, heading, AhrsFloatCmpl::ltp_to_body_rmat, AhrsFloatCmpl::rate_correction, RATES_ADD_SCALED_VECT, RMAT_ELMT, and FloatVect3::x.
Referenced by ahrs_fc_update_gps().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_fc_update_mag | ( | struct FloatVect3 * | mag, |
| float | dt | ||
| ) |
Definition at line 269 of file ahrs_float_cmpl.c.
References ahrs_fc, ahrs_fc_update_mag_2d(), ahrs_fc_update_mag_full(), and AhrsFloatCmpl::mag_cnt.
Referenced by mag_cb().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_fc_update_mag_2d | ( | struct FloatVect3 * | mag, |
| float | dt | ||
| ) |
Definition at line 316 of file ahrs_float_cmpl.c.
References ahrs_fc, float_rmat_transp_vmult(), float_rmat_vmult(), float_vect2_normalize(), foo, AhrsFloatCmpl::gyro_bias, AhrsFloatCmpl::ltp_to_body_rmat, AhrsFloatCmpl::mag_cnt, AhrsFloatCmpl::mag_h, AhrsFloatCmpl::mag_omega, AhrsFloatCmpl::mag_zeta, AhrsFloatCmpl::rate_correction, RATES_ADD_SCALED_VECT, VECT2_COPY, FloatVect2::x, and FloatVect3::x.
Referenced by ahrs_fc_update_mag().
Here is the call graph for this function: Here is the caller graph for this function:| void ahrs_fc_update_mag_2d_dumb | ( | struct FloatVect3 * | mag | ) |
Definition at line 361 of file ahrs_float_cmpl.c.
References ahrs_fc, float_eulers_of_rmat(), foo, AhrsFloatCmpl::gyro_bias, AhrsFloatCmpl::ltp_to_body_rmat, FloatEulers::phi, AhrsFloatCmpl::rate_correction, RATES_ADD_SCALED_VECT, RMAT_ELMT, FloatEulers::theta, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Here is the call graph for this function:| void ahrs_fc_update_mag_full | ( | struct FloatVect3 * | mag, |
| float | dt | ||
| ) |
Definition at line 286 of file ahrs_float_cmpl.c.
References ahrs_fc, float_rmat_vmult(), foo, AhrsFloatCmpl::gyro_bias, AhrsFloatCmpl::ltp_to_body_rmat, AhrsFloatCmpl::mag_cnt, AhrsFloatCmpl::mag_h, AhrsFloatCmpl::mag_omega, AhrsFloatCmpl::mag_zeta, AhrsFloatCmpl::rate_correction, RATES_ADD_SCALED_VECT, and VECT3_CROSS_PRODUCT.
Referenced by ahrs_fc_update_mag().
Here is the call graph for this function: Here is the caller graph for this function:| struct AhrsFloatCmpl ahrs_fc |
Definition at line 80 of file ahrs_float_cmpl.c.
Referenced by accel_cb(), ahrs_fc_align(), ahrs_fc_init(), ahrs_fc_propagate(), ahrs_fc_realign_heading(), ahrs_fc_update_accel(), ahrs_fc_update_gps(), ahrs_fc_update_heading(), ahrs_fc_update_mag(), ahrs_fc_update_mag_2d(), ahrs_fc_update_mag_2d_dumb(), ahrs_fc_update_mag_full(), aligner_cb(), compute_body_orientation_and_rates(), geo_mag_cb(), gyro_cb(), mag_cb(), send_bias(), send_euler(), send_euler_int(), send_filter_status(), and send_geo_mag().