|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.8.2_stable-0-g6260b7c
Paparazzi is a free software Unmanned Aircraft System.
|
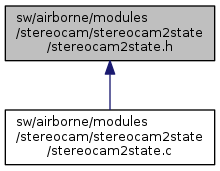
#include "state.h"#include "math/pprz_algebra_int.h"#include "math/pprz_algebra_float.h"#include "math/pprz_orientation_conversion.h"#include <std.h>#include "modules/stereocam/stereocam.h" Include dependency graph for stereocam2state.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for stereocam2state.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | GpsStereoCam |
Functions | |
| void | stereo_to_state_init (void) |
| void | stereo_to_state_periodic (void) |
Variables | |
| struct GpsStereoCam | gps_stereocam |
Definition in file stereocam2state.h.
| struct GpsStereoCam |
Definition at line 24 of file stereocam2state.h.
Collaboration diagram for GpsStereoCam:| Data Fields | ||
|---|---|---|
| struct EcefCoor_i | ecef_vel | |
| void stereo_to_state_init | ( | void | ) |
Definition at line 56 of file stereocam2state.c.
References stereocam_gps_cb(), and STEREOCAM_GPS_ID.
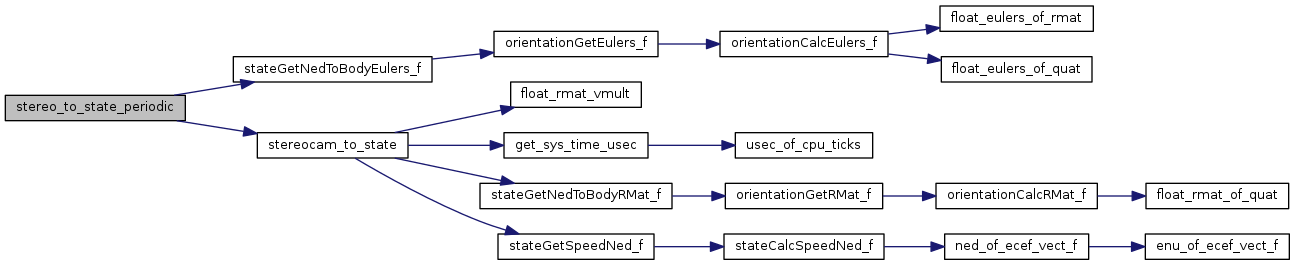
Here is the call graph for this function:| void stereo_to_state_periodic | ( | void | ) |
Definition at line 62 of file stereocam2state.c.
References uint8array::fresh, FloatEulers::phi, prev_phi, prev_theta, stateGetNedToBodyEulers_f(), stereocam_data, stereocam_to_state(), and FloatEulers::theta.
Here is the call graph for this function:| struct GpsStereoCam gps_stereocam |
Definition at line 42 of file stereocam2state.c.
Referenced by stereocam_gps_cb(), and stereocam_to_state().
 1.8.8
1.8.8