|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
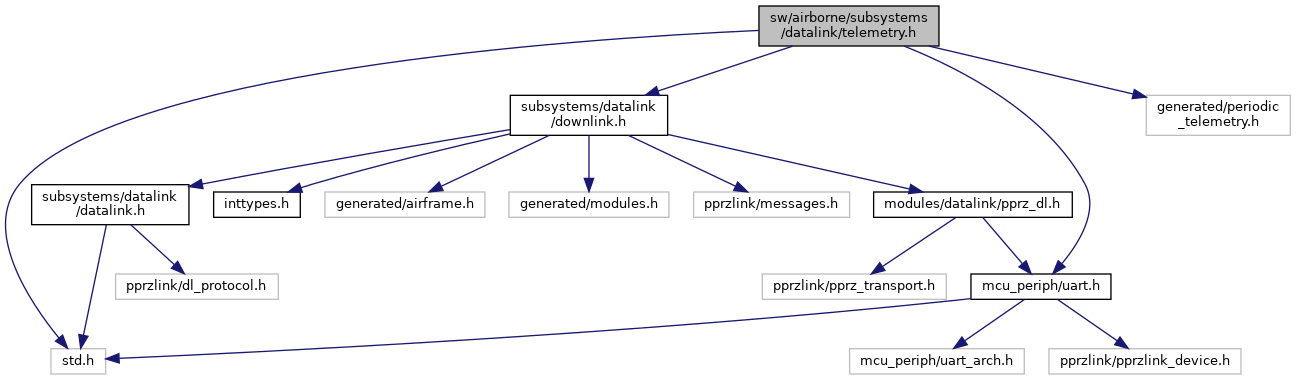
#include "std.h"#include "mcu_periph/uart.h"#include "generated/periodic_telemetry.h"#include "subsystems/datalink/downlink.h" Include dependency graph for telemetry.h:
Include dependency graph for telemetry.h:Go to the source code of this file.
Macros | |
| #define | DefaultPeriodic (&pprz_telemetry) |
| Set default periodic telemetry. More... | |
Variables | |
| struct periodic_telemetry | pprz_telemetry |
| Global telemetry structure. More... | |
Periodic telemetry system header (includes downlink utility and generated code).
In order to use it a subsystem/module:
Definition in file telemetry.h.
| #define DefaultPeriodic (&pprz_telemetry) |
Set default periodic telemetry.
Definition at line 66 of file telemetry.h.
| struct periodic_telemetry pprz_telemetry |
Global telemetry structure.
Contains the list of message names and registered callbacks. Filled with generated structure from periodic_telemetry.h
Definition at line 37 of file telemetry.c.
 1.8.17
1.8.17