|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
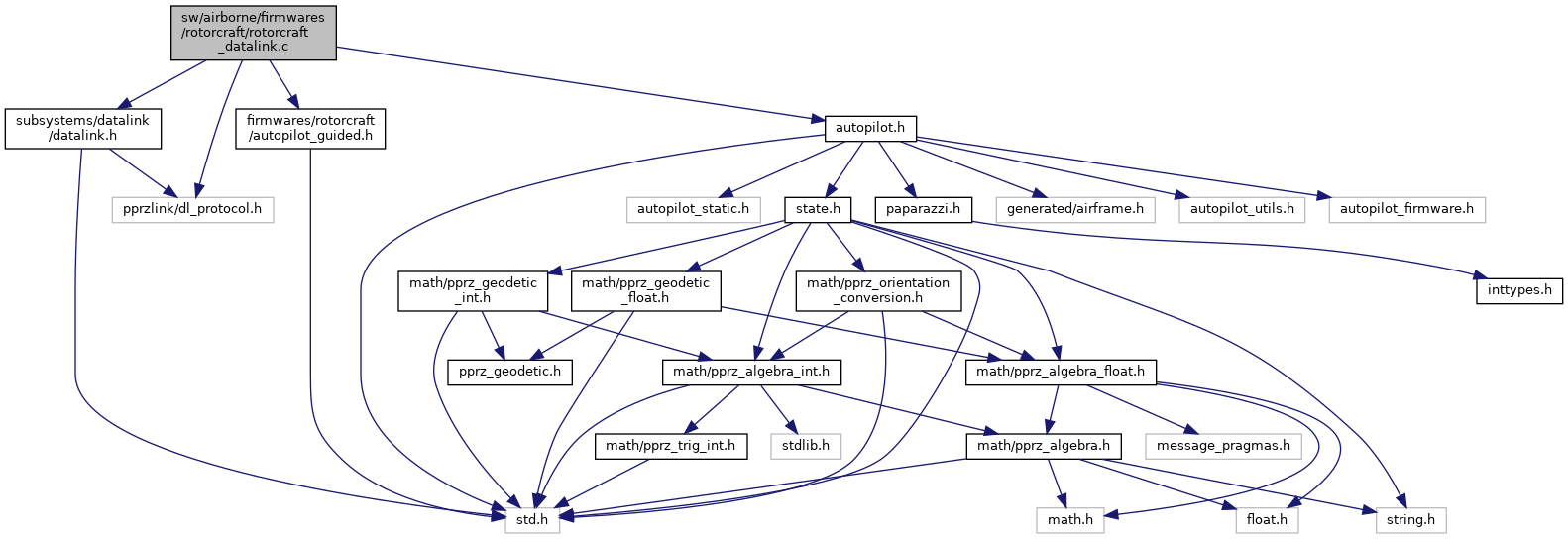
#include "subsystems/datalink/datalink.h"#include "pprzlink/dl_protocol.h"#include "autopilot.h"#include "firmwares/rotorcraft/autopilot_guided.h" Include dependency graph for rotorcraft_datalink.c:
Include dependency graph for rotorcraft_datalink.c:Go to the source code of this file.
Functions | |
| void | firmware_parse_msg (struct link_device *dev, struct transport_tx *trans, uint8_t *buf) |
| Firmware specfic msg handler. More... | |
Handling of messages coming from ground and other A/Cs.
Definition in file rotorcraft_datalink.c.
| void firmware_parse_msg | ( | struct link_device * | dev, |
| struct transport_tx * | trans, | ||
| uint8_t * | buf | ||
| ) |
Firmware specfic msg handler.
NAV
WIND_INFO
Definition at line 40 of file rotorcraft_datalink.c.
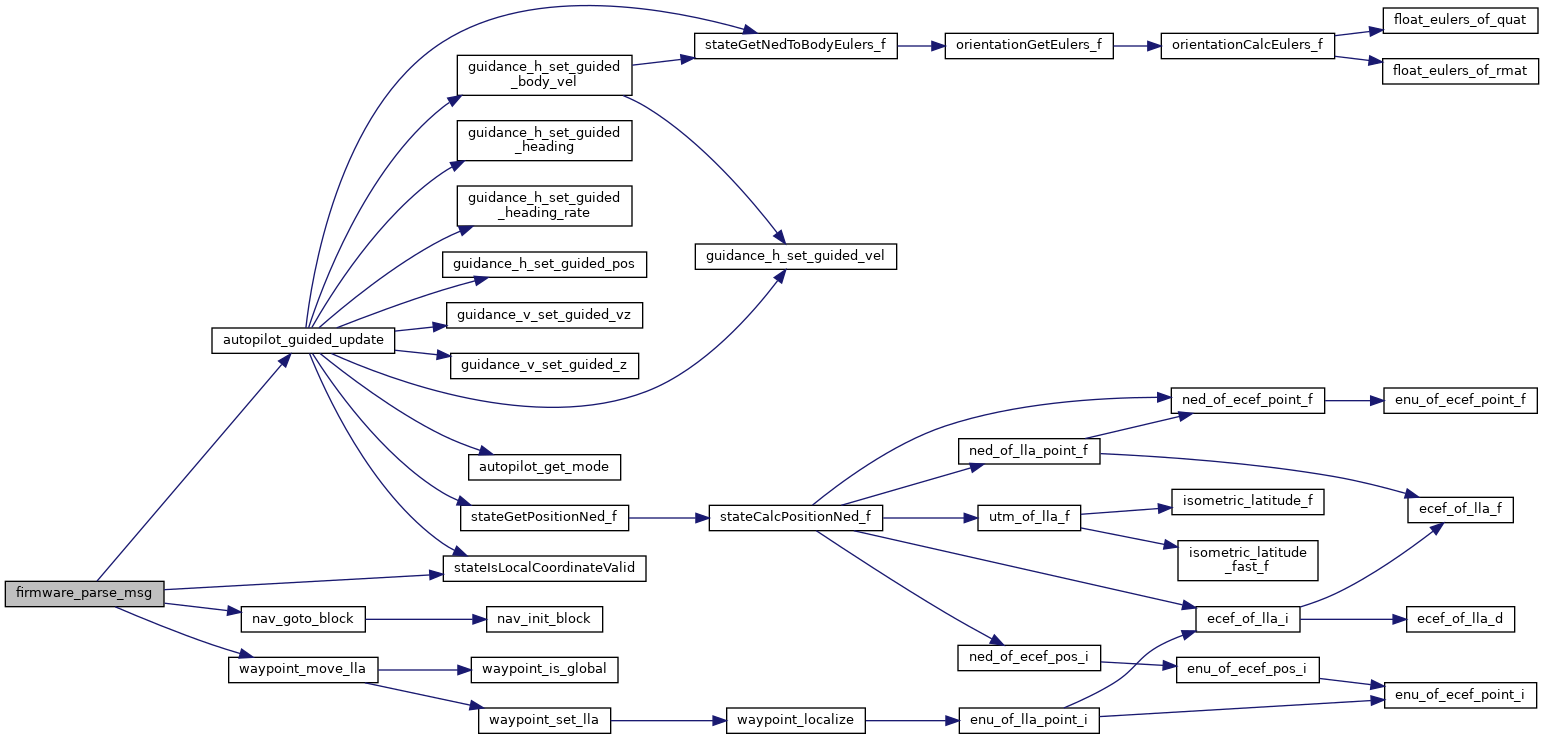
References ac_id, LlaCoor_i::alt, autopilot_guided_update(), LtpDef_i::hmsl, LlaCoor_i::lat, LtpDef_i::lla, LlaCoor_i::lon, nav_goto_block(), State::ned_origin_i, state, stateIsLocalCoordinateValid(), and waypoint_move_lla().
Here is the call graph for this function: 1.8.17
1.8.17