|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
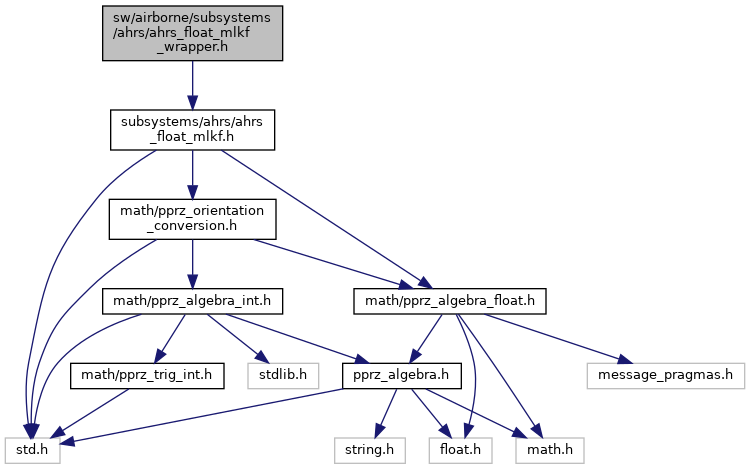
#include "subsystems/ahrs/ahrs_float_mlkf.h" Include dependency graph for ahrs_float_mlkf_wrapper.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ahrs_float_mlkf_wrapper.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | PRIMARY_AHRS ahrs_mlkf |
Functions | |
| void | ahrs_mlkf_register (void) |
Paparazzi specific wrapper to run MLKF filter.
Definition in file ahrs_float_mlkf_wrapper.h.
| #define PRIMARY_AHRS ahrs_mlkf |
Definition at line 33 of file ahrs_float_mlkf_wrapper.h.
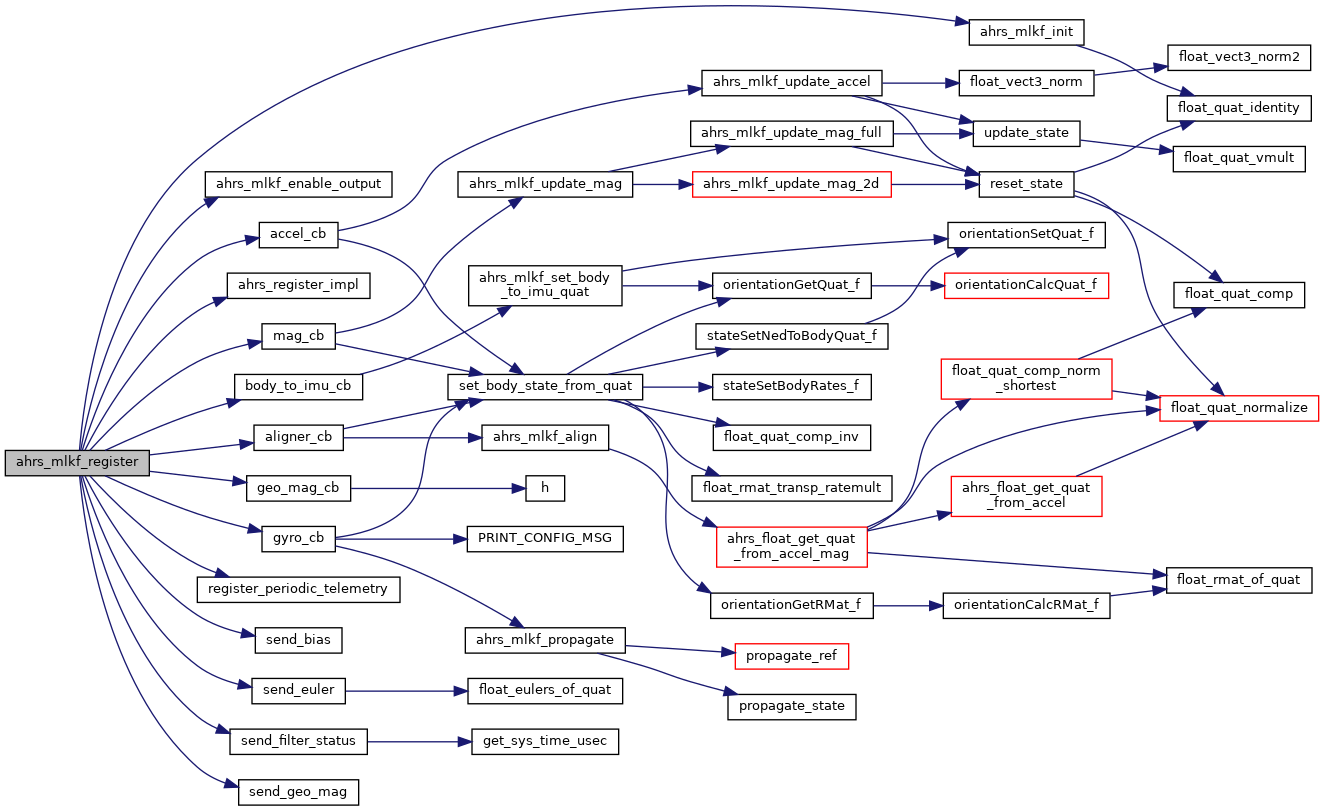
| void ahrs_mlkf_register | ( | void | ) |
Definition at line 222 of file ahrs_float_mlkf_wrapper.c.
References ABI_BROADCAST, accel_cb(), accel_ev, ahrs_mlkf_enable_output(), AHRS_MLKF_IMU_ID, ahrs_mlkf_init(), AHRS_MLKF_MAG_ID, AHRS_MLKF_OUTPUT_ENABLED, ahrs_mlkf_output_enabled, ahrs_register_impl(), aligner_cb(), aligner_ev, body_to_imu_cb(), body_to_imu_ev, DefaultPeriodic, geo_mag_cb(), geo_mag_ev, gyro_cb(), gyro_ev, mag_cb(), mag_ev, register_periodic_telemetry(), send_bias(), send_euler(), send_filter_status(), and send_geo_mag().
Here is the call graph for this function: 1.8.17
1.8.17