|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "firmwares/rotorcraft/stabilization/stabilization_indi_simple.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_rc_setpoint.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_quat_transformations.h"#include "state.h"#include "generated/airframe.h"#include "paparazzi.h"#include "modules/radio_control/radio_control.h"#include "filters/low_pass_filter.h"#include "modules/datalink/telemetry.h" Include dependency graph for stabilization_indi_simple.c:
Include dependency graph for stabilization_indi_simple.c:Go to the source code of this file.
Functions | |
| static void | lms_estimation (void) |
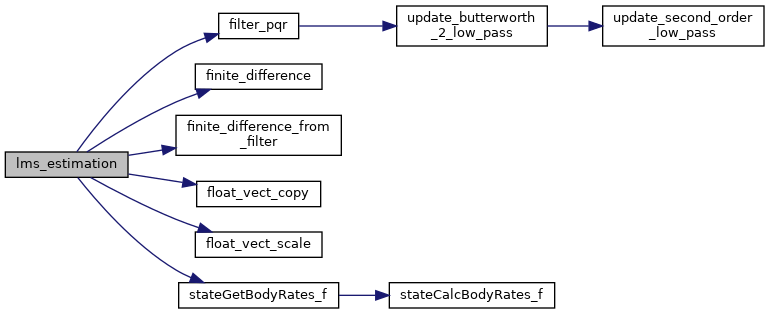
| This is a Least Mean Squares adaptive filter It estimates the actuator effectiveness online, by comparing the expected angular acceleration based on the inputs with the measured angular acceleration. | |
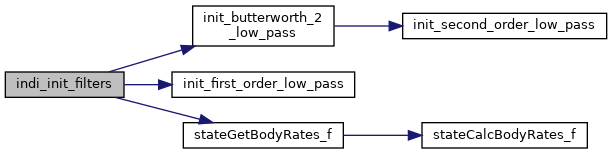
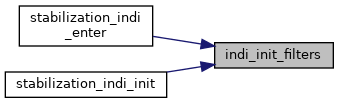
| static void | indi_init_filters (void) |
| static void | send_att_indi (struct transport_tx *trans, struct link_device *dev) |
| static void | send_eff_mat_g_indi_simple (struct transport_tx *trans, struct link_device *dev) |
| static void | send_ahrs_ref_quat (struct transport_tx *trans, struct link_device *dev) |
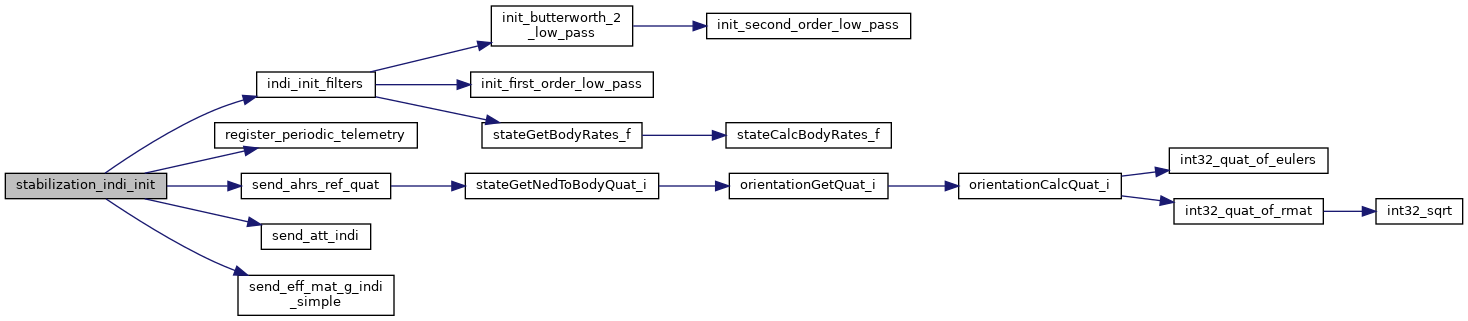
| void | stabilization_indi_init (void) |
| Function that initializes important values upon engaging INDI. | |
| void | stabilization_indi_simple_reset_r_filter_cutoff (float new_cutoff) |
| void | stabilization_indi_enter (void) |
| Function that resets important values upon engaging INDI. | |
| static void | filter_pqr (Butterworth2LowPass *filter, struct FloatRates *new_values) |
| Update butterworth filter for p, q and r of a FloatRates struct. | |
| static void | finite_difference_from_filter (float *output, Butterworth2LowPass *filter) |
| Caclulate finite difference form a filter array The filter already contains the previous values. | |
| static void | finite_difference (float output[3], float new[3], float old[3]) |
| Calculate derivative of an array via finite difference. | |
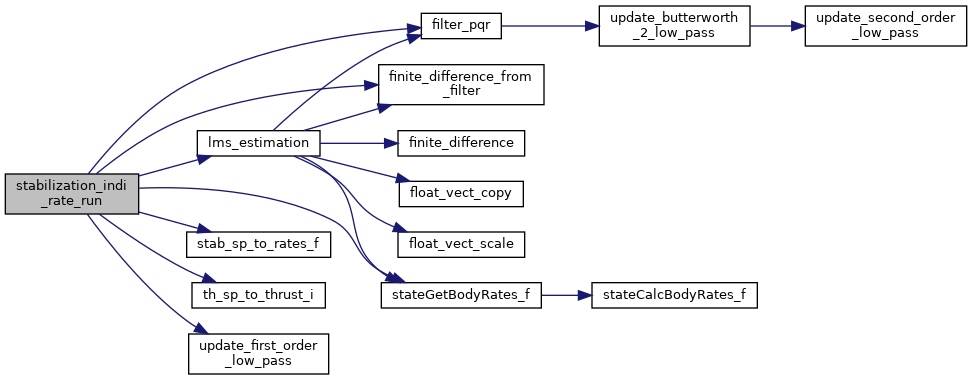
| void | stabilization_indi_rate_run (bool in_flight, struct StabilizationSetpoint *sp, struct ThrustSetpoint *thrust, int32_t *cmd) |
| Does the INDI calculations. | |
| void | stabilization_indi_attitude_run (bool in_flight, struct StabilizationSetpoint *att_sp, struct ThrustSetpoint *thrust, int32_t *cmd) |
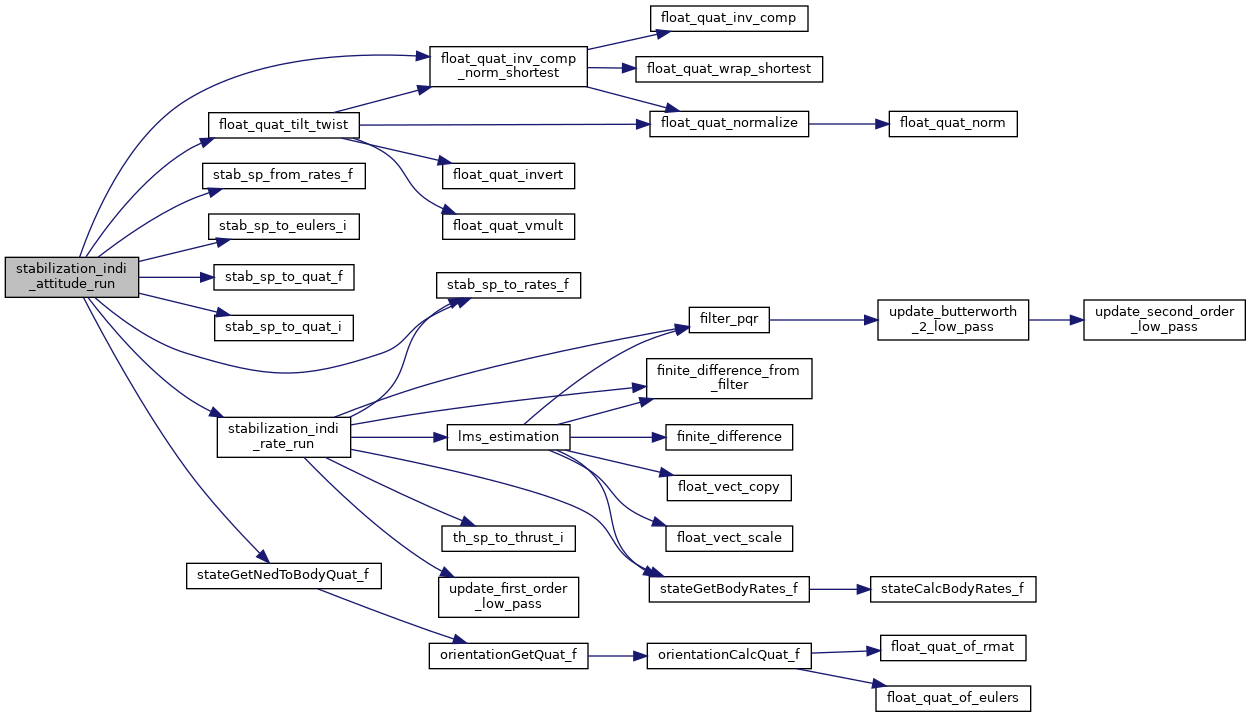
| runs stabilization indi | |
Variables | |
| struct Int32Eulers | stab_att_sp_euler |
| struct Int32Quat | stab_att_sp_quat |
| static struct FirstOrderLowPass | rates_filt_fo [3] |
| struct IndiVariables | indi |
| #define INDI_EST_SCALE 0.001 |
Definition at line 107 of file stabilization_indi_simple.c.
| #define STABILIZATION_INDI_ESTIMATION_FILT_CUTOFF 4.0 |
Definition at line 77 of file stabilization_indi_simple.c.
| #define STABILIZATION_INDI_FILT_CUTOFF 8.0 |
Definition at line 56 of file stabilization_indi_simple.c.
| #define STABILIZATION_INDI_FILT_CUTOFF_P 20.0 |
Definition at line 83 of file stabilization_indi_simple.c.
| #define STABILIZATION_INDI_FILT_CUTOFF_Q 20.0 |
Definition at line 89 of file stabilization_indi_simple.c.
| #define STABILIZATION_INDI_FILT_CUTOFF_R 20.0 |
Definition at line 95 of file stabilization_indi_simple.c.
| #define STABILIZATION_INDI_FILT_CUTOFF_RDOT STABILIZATION_INDI_FILT_CUTOFF |
Definition at line 61 of file stabilization_indi_simple.c.
| #define STABILIZATION_INDI_MAX_R STABILIZATION_ATTITUDE_SP_MAX_R |
Definition at line 73 of file stabilization_indi_simple.c.
| #define STABILIZATION_INDI_MAX_RATE 6.0 |
Definition at line 65 of file stabilization_indi_simple.c.
|
inlinestatic |
Update butterworth filter for p, q and r of a FloatRates struct.
| filter | The filter array to use |
| new_values | The new values |
Definition at line 269 of file stabilization_indi_simple.c.
References foo, and update_butterworth_2_low_pass().
Referenced by lms_estimation(), and stabilization_indi_rate_run().
Here is the call graph for this function: Here is the caller graph for this function:Calculate derivative of an array via finite difference.
| output[3] | The output array |
| new[3] | The newest values |
| old[3] | The values of the previous timestep |
Definition at line 297 of file stabilization_indi_simple.c.
References foo.
Referenced by lms_estimation().
Here is the caller graph for this function:
|
inlinestatic |
Caclulate finite difference form a filter array The filter already contains the previous values.
| output | The output array |
| filter | The filter array input |
Definition at line 283 of file stabilization_indi_simple.c.
References foo, and SecondOrderLowPass::o.
Referenced by lms_estimation(), and stabilization_indi_rate_run().
Here is the caller graph for this function:Definition at line 218 of file stabilization_indi_simple.c.
References IndiVariables::est, foo, indi, init_butterworth_2_low_pass(), init_first_order_low_pass(), p, IndiEstimation::rate, IndiVariables::rate, rates_filt_fo, STABILIZATION_INDI_ESTIMATION_FILT_CUTOFF, STABILIZATION_INDI_FILT_CUTOFF, STABILIZATION_INDI_FILT_CUTOFF_P, STABILIZATION_INDI_FILT_CUTOFF_Q, STABILIZATION_INDI_FILT_CUTOFF_R, STABILIZATION_INDI_FILT_CUTOFF_RDOT, stateGetBodyRates_f(), IndiEstimation::u, and IndiVariables::u.
Referenced by stabilization_indi_enter(), and stabilization_indi_init().
Here is the call graph for this function: Here is the caller graph for this function:This is a Least Mean Squares adaptive filter It estimates the actuator effectiveness online, by comparing the expected angular acceleration based on the inputs with the measured angular acceleration.
Definition at line 464 of file stabilization_indi_simple.c.
References IndiVariables::adaptive, IndiVariables::est, filter_pqr(), finite_difference(), finite_difference_from_filter(), float_vect_copy(), float_vect_scale(), foo, IndiEstimation::g1, IndiVariables::g1, IndiEstimation::g2, IndiVariables::g2, indi, INDI_EST_SCALE, IndiEstimation::mu, FloatRates::p, FloatRates::q, FloatRates::r, IndiEstimation::rate, IndiEstimation::rate_d, IndiEstimation::rate_dd, stateGetBodyRates_f(), IndiEstimation::u, IndiVariables::u_act_dyn, IndiEstimation::u_d, and IndiEstimation::u_dd.
Referenced by stabilization_indi_rate_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 181 of file stabilization_indi_simple.c.
References dev, foo, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, stab_att_sp_quat, and stateGetNedToBodyQuat_i().
Referenced by stabilization_indi_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 150 of file stabilization_indi_simple.c.
References IndiVariables::angular_accel_ref, dev, foo, indi, SecondOrderLowPass::o, FloatRates::p, FloatRates::q, FloatRates::r, IndiVariables::rate, and IndiVariables::rate_d.
Referenced by stabilization_indi_init().
Here is the caller graph for this function:
|
static |
Definition at line 166 of file stabilization_indi_simple.c.
References dev, IndiVariables::est, foo, IndiEstimation::g1, IndiEstimation::g2, indi, INDI_EST_SCALE, and RATES_SMUL.
Referenced by stabilization_indi_init().
Here is the caller graph for this function:| void stabilization_indi_attitude_run | ( | bool | in_flight, |
| struct StabilizationSetpoint * | att_sp, | ||
| struct ThrustSetpoint * | thrust, | ||
| int32_t * | cmd | ||
| ) |
runs stabilization indi
| in_flight | not used |
| rate_control | rate control enabled, otherwise attitude control |
Definition at line 417 of file stabilization_indi_simple.c.
References Indi_gains::att, float_quat_inv_comp_norm_shortest(), float_quat_tilt_twist(), foo, IndiVariables::gains, indi, FloatRates::p, FloatRates::q, FloatRates::r, Indi_gains::rate, RATES_ADD, StabilizationSetpoint::sp, stab_att_sp_euler, stab_att_sp_quat, stab_sp_from_rates_f(), stab_sp_to_eulers_i(), stab_sp_to_quat_f(), stab_sp_to_quat_i(), stab_sp_to_rates_f(), stabilization_indi_rate_run(), and stateGetNedToBodyQuat_f().
Here is the call graph for this function:Function that resets important values upon engaging INDI.
Don't reset inputs and filters, because it is unlikely to switch stabilization in flight, and there are multiple modes that use (the same) stabilization. Resetting the controller is not so nice when you are flying. FIXME: Ideally we should detect when coming from something that is not INDI
Definition at line 250 of file stabilization_indi_simple.c.
References IndiVariables::angular_accel_ref, FLOAT_RATES_ZERO, indi, indi_init_filters(), Int32Eulers::psi, stab_att_sp_euler, stabilization_attitude_get_heading_i(), IndiVariables::u_act_dyn, and IndiVariables::u_in.
Here is the call graph for this function:Function that initializes important values upon engaging INDI.
Definition at line 196 of file stabilization_indi_simple.c.
References IndiVariables::act_dyn, DefaultPeriodic, foo, indi, indi_init_filters(), FloatRates::p, FloatRates::q, FloatRates::r, register_periodic_telemetry(), send_ahrs_ref_quat(), send_att_indi(), and send_eff_mat_g_indi_simple().
Here is the call graph for this function:| void stabilization_indi_rate_run | ( | bool | in_flight, |
| struct StabilizationSetpoint * | sp, | ||
| struct ThrustSetpoint * | thrust, | ||
| int32_t * | cmd | ||
| ) |
Does the INDI calculations.
| in_flight | true aircraft is flying |
| sp | rate setpoint |
| thrust | thrust setpoint |
| cmd | output command array |
Definition at line 312 of file stabilization_indi_simple.c.
References IndiVariables::act_dyn, IndiVariables::angular_accel_ref, IndiVariables::attitude_max_yaw_rate, IndiVariables::du, filter_pqr(), finite_difference_from_filter(), FLOAT_RATES_ZERO, foo, IndiVariables::g1, IndiVariables::g2, IndiVariables::gains, indi, lms_estimation(), MAX_PPRZ, SecondOrderLowPass::o, FloatRates::p, FloatRates::q, FloatRates::r, Indi_gains::rate, IndiVariables::rate, IndiVariables::rate_d, rates_filt_fo, stab_sp_to_rates_f(), stateGetBodyRates_f(), th_sp_to_thrust_i(), THRUST_AXIS_Z, IndiVariables::u, IndiVariables::u_act_dyn, IndiVariables::u_in, and update_first_order_low_pass().
Referenced by stabilization_indi_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 243 of file stabilization_indi_simple.c.
References IndiVariables::cutoff_r, foo, indi, init_first_order_low_pass(), rates_filt_fo, and stateGetBodyRates_f().
Here is the call graph for this function:| struct IndiVariables indi |
Definition at line 109 of file stabilization_indi_simple.c.
Referenced by ctrl_eff_scheduling_periodic(), indi_init_filters(), lms_estimation(), send_att_indi(), send_eff_mat_g_indi_simple(), stabilization_indi_attitude_run(), stabilization_indi_enter(), stabilization_indi_init(), stabilization_indi_rate_run(), and stabilization_indi_simple_reset_r_filter_cutoff().
|
static |
Definition at line 101 of file stabilization_indi_simple.c.
Referenced by indi_init_filters(), stabilization_indi_rate_run(), and stabilization_indi_simple_reset_r_filter_cutoff().
| struct Int32Eulers stab_att_sp_euler |
Definition at line 98 of file stabilization_indi_simple.c.
Referenced by stabilization_indi_attitude_run(), and stabilization_indi_enter().
| struct Int32Quat stab_att_sp_quat |
Definition at line 99 of file stabilization_indi_simple.c.
Referenced by send_ahrs_ref_quat(), and stabilization_indi_attitude_run().