|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Driver for the Invensense v3 IMUs ICM40605, ICM40609, ICM42605, IIM42652 and ICM42688. More...
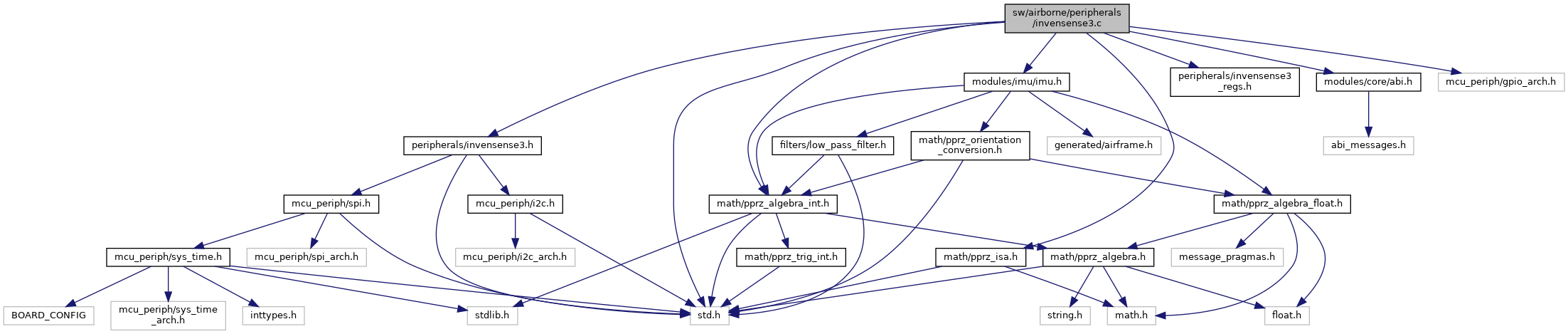
#include "peripherals/invensense3.h"#include "peripherals/invensense3_regs.h"#include "math/pprz_isa.h"#include "math/pprz_algebra_int.h"#include "math/pprz_algebra_float.h"#include "modules/imu/imu.h"#include "modules/core/abi.h"#include "mcu_periph/gpio_arch.h"#include "std.h" Include dependency graph for invensense3.c:
Include dependency graph for invensense3.c:Go to the source code of this file.
Functions | |
| static void | invensense3_parse_fifo_data (struct invensense3_t *inv, uint8_t *data, uint16_t samples) |
| Parse the FIFO buffer data. | |
| static void | invensense3_parse_reg_data (struct invensense3_t *inv, uint8_t *data) |
| Parse data from registers. | |
| static void | invensense3_fix_config (struct invensense3_t *inv) |
| This fixes the configuration errors and sets the correct scalings. | |
| static bool | invensense3_register_write (struct invensense3_t *inv, uint16_t bank_reg, uint8_t value) |
| Write a register based on a combined bank/regsiter value. | |
| static bool | invensense3_register_read (struct invensense3_t *inv, uint16_t bank_reg, uint16_t size) |
| Read a register based on a combined bank/regsiter value. | |
| static bool | invensense3_select_bank (struct invensense3_t *inv, uint8_t bank) |
| Select the correct register bank. | |
| static bool | invensense3_config (struct invensense3_t *inv) |
| Configure the Invensense 3 device register by register. | |
| static bool | invensense3_reset_fifo (struct invensense3_t *inv) |
| Reset FIFO (can be useful in some situations) | |
| static int | samples_from_odr (int odr) |
| void | invensense3_init (struct invensense3_t *inv) |
| Initialize the invensense v3 sensor instance. | |
| void | invensense3_periodic (struct invensense3_t *inv) |
| Should be called periodically to request sensor readings. | |
| void | invensense3_event (struct invensense3_t *inv) |
| Should be called in the event thread. | |
Variables | |
| static const struct FloatRates | invensense3_gyro_scale_f [8] |
| static const struct FloatVect3 | invensense3_accel_scale_f [5] |
| static const uint16_t | invensense3_aaf [][4] |
| static const uint16_t | invensense3_aaf4x605 [][4] |
| static const uint8_t | invensense3_fifo_sample_size [4] = {8,8,16,20} |
Driver for the Invensense v3 IMUs ICM40605, ICM40609, ICM42605, IIM42652 and ICM42688.
Definition in file invensense3.c.
|
static |
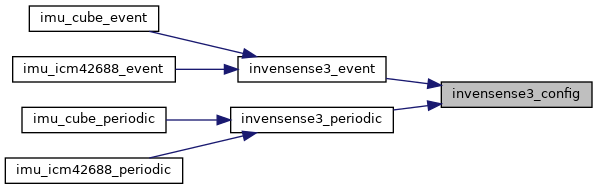
Configure the Invensense 3 device register by register.
| inv | The invensense v3 instance |
Definition at line 825 of file invensense3.c.
References ACCEL_AAF_BITSHIFT_SHIFT, ACCEL_AAF_DELT_SHIFT, ACCEL_FS_SEL_SHIFT, ACCEL_MODE_LN, ACCEL_MODE_SHIFT, ACCEL_ODR_SHIFT, BIT_DEVICE_CONFIG_SOFT_RESET_CONFIG, BIT_FIFO_CONFIG1_ACCEL_EN, BIT_FIFO_CONFIG1_GYRO_EN, BIT_FIFO_CONFIG1_TEMP_EN, BIT_FIFO_FULL_INT_EN, BIT_FIFO_THS_INT_EN, BIT_INT_ASYNC_RESET, BIT_UI_DRDY_INT_EN, FIFO_CONFIG_MODE_SHIFT, FIFO_CONFIG_MODE_STOP_ON_FULL, FIFO_COUNT_REC, foo, get_sys_time_usec(), GYRO_AAF_BITSHIFT_SHIFT, GYRO_FS_SEL_SHIFT, GYRO_MODE_LN, GYRO_MODE_SHIFT, GYRO_ODR_SHIFT, INV3REG_ACCEL_CONFIG0, INV3REG_ACCEL_CONFIG_STATIC2, INV3REG_ACCEL_CONFIG_STATIC3, INV3REG_ACCEL_CONFIG_STATIC4, INV3REG_DEVICE_CONFIG, INV3REG_FIFO_CONFIG, INV3REG_FIFO_CONFIG1, INV3REG_FIFO_CONFIG2, INV3REG_FIFO_CONFIG3, INV3REG_GYRO_CONFIG0, INV3REG_GYRO_CONFIG_STATIC2, INV3REG_GYRO_CONFIG_STATIC3, INV3REG_GYRO_CONFIG_STATIC4, INV3REG_GYRO_CONFIG_STATIC5, INV3REG_INT_CONFIG1, INV3REG_INT_SOURCE0, INV3REG_INTF_CONFIG0, INV3REG_INTF_CONFIG1, INV3REG_PWR_MGMT0, INVENSENSE3_ICM40609, INVENSENSE3_PARSER_FIFO, INVENSENSE3_PARSER_REGISTERS, invensense3_register_write(), and invensense3_reset_fifo().
Referenced by invensense3_event(), and invensense3_periodic().
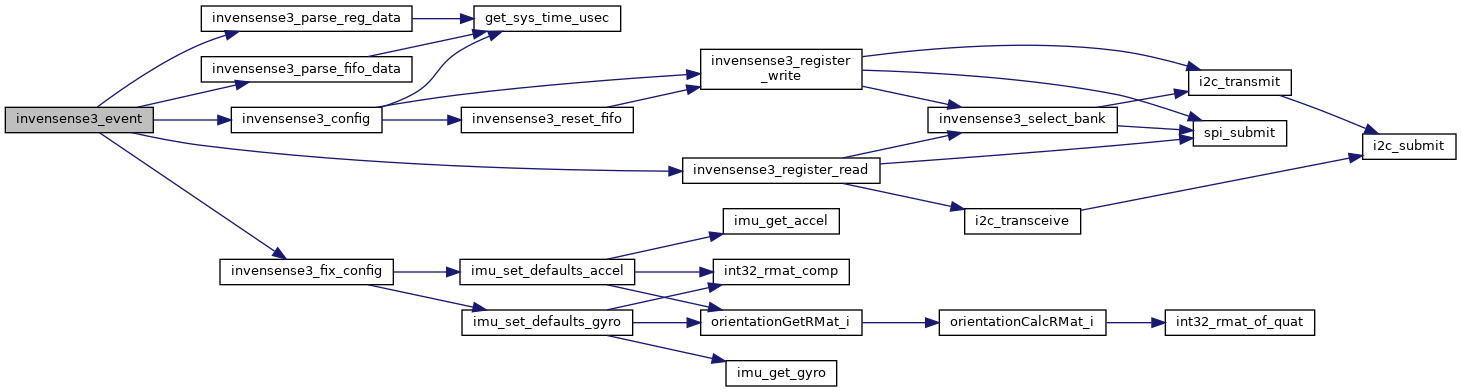
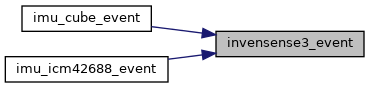
Here is the call graph for this function: Here is the caller graph for this function:| void invensense3_event | ( | struct invensense3_t * | inv | ) |
Should be called in the event thread.
| inv | The invensense v3 instance |
Definition at line 315 of file invensense3.c.
References foo, I2CTransDone, I2CTransFailed, I2CTransSuccess, INV3_WHOAMI_ICM40605, INV3_WHOAMI_ICM40609, INV3_WHOAMI_ICM42605, INV3_WHOAMI_ICM42688, INV3_WHOAMI_IIM42652, INV3REG_BANK_SEL, INV3REG_FIFO_COUNTH, invensense3_config(), INVENSENSE3_CONFIG, invensense3_fifo_sample_size, invensense3_fix_config(), INVENSENSE3_I2C, INVENSENSE3_ICM40605, INVENSENSE3_ICM40609, INVENSENSE3_ICM42605, INVENSENSE3_ICM42688, INVENSENSE3_IDLE, INVENSENSE3_IIM42652, invensense3_parse_fifo_data(), invensense3_parse_reg_data(), INVENSENSE3_PARSER_FIFO, INVENSENSE3_PARSER_REGISTERS, invensense3_register_read(), INVENSENSE3_RUNNING, INVENSENSE3_SPI, Min, n_samples, SPITransDone, SPITransFailed, and SPITransSuccess.
Referenced by imu_cube_event(), imu_icm42688_event(), and imu_pixhawk6x_event().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
This fixes the configuration errors and sets the correct scalings.
| inv | The invensense v3 instance |
Definition at line 546 of file invensense3.c.
References foo, imu_set_defaults_accel(), imu_set_defaults_gyro(), invensense3_aaf, invensense3_aaf4x605, INVENSENSE3_ACCEL_ODR_100HZ, INVENSENSE3_ACCEL_ODR_12_5HZ, INVENSENSE3_ACCEL_ODR_16KHZ, INVENSENSE3_ACCEL_ODR_1_5625HZ, INVENSENSE3_ACCEL_ODR_1KHZ, INVENSENSE3_ACCEL_ODR_200HZ, INVENSENSE3_ACCEL_ODR_25HZ, INVENSENSE3_ACCEL_ODR_2KHZ, INVENSENSE3_ACCEL_ODR_32KHZ, INVENSENSE3_ACCEL_ODR_3_125HZ, INVENSENSE3_ACCEL_ODR_4KHZ, INVENSENSE3_ACCEL_ODR_500HZ, INVENSENSE3_ACCEL_ODR_50HZ, INVENSENSE3_ACCEL_ODR_6_25HZ, INVENSENSE3_ACCEL_ODR_8KHZ, INVENSENSE3_ACCEL_RANGE_16G, INVENSENSE3_ACCEL_RANGE_4G, invensense3_accel_scale_f, INVENSENSE3_GYRO_ODR_100HZ, INVENSENSE3_GYRO_ODR_12_5HZ, INVENSENSE3_GYRO_ODR_16KHZ, INVENSENSE3_GYRO_ODR_1_5625HZ, INVENSENSE3_GYRO_ODR_1KHZ, INVENSENSE3_GYRO_ODR_200HZ, INVENSENSE3_GYRO_ODR_25HZ, INVENSENSE3_GYRO_ODR_2KHZ, INVENSENSE3_GYRO_ODR_32KHZ, INVENSENSE3_GYRO_ODR_3_125HZ, INVENSENSE3_GYRO_ODR_4KHZ, INVENSENSE3_GYRO_ODR_500HZ, INVENSENSE3_GYRO_ODR_50HZ, INVENSENSE3_GYRO_ODR_6_25HZ, INVENSENSE3_GYRO_ODR_8KHZ, invensense3_gyro_scale_f, INVENSENSE3_ICM40605, INVENSENSE3_ICM40609, INVENSENSE3_ICM42605, and RMAT_COPY.
Referenced by invensense3_event().
Here is the call graph for this function: Here is the caller graph for this function:| void invensense3_init | ( | struct invensense3_t * | inv | ) |
Initialize the invensense v3 sensor instance.
| inv | The structure containing the configuration of the invensense v3 instance |
Definition at line 211 of file invensense3.c.
References foo, I2CTransDone, INVENSENSE3_IDLE, INVENSENSE3_SAMPLE_SIZE_PK3, INVENSENSE3_SPI, INVENSENSE3_UNKOWN, Min, samples_from_odr(), SPICphaEdge2, SPICpolIdleHigh, SPIDiv16, SPIDss8bit, SPIMSBFirst, SPISelectUnselect, and SPITransDone.
Referenced by imu_cube_init(), imu_icm42688_init(), and imu_pixhawk6x_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Parse the FIFO buffer data.
| inv | The invensense v3 instance |
| data | The FIFO buffer data to parse |
| len | The length of the FIFO buffer |
Definition at line 446 of file invensense3.c.
References foo, get_sys_time_usec(), INVENSENSE3_FIFO_BUFFER_LEN, invensense3_fifo_sample_size, Min, Int32Rates::p, Int32Rates::q, Int32Rates::r, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by invensense3_event().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Parse data from registers.
| inv | The invensense v3 instance |
| data | The data from all registers (DATA_TEMP, DATA_ACCEL and DATA_GYRO) |
Definition at line 518 of file invensense3.c.
References foo, get_sys_time_usec(), Int32Rates::p, Int32Rates::q, Int32Rates::r, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Referenced by invensense3_event().
Here is the call graph for this function: Here is the caller graph for this function:| void invensense3_periodic | ( | struct invensense3_t * | inv | ) |
Should be called periodically to request sensor readings.
| inv | The invensense v3 instance |
Definition at line 263 of file invensense3.c.
References foo, I2CTransDone, INV3REG_FIFO_COUNTH, INV3REG_TEMP_DATA1, INV3REG_WHO_AM_I, invensense3_config(), INVENSENSE3_CONFIG, invensense3_fifo_sample_size, INVENSENSE3_I2C, INVENSENSE3_IDLE, INVENSENSE3_PARSER_FIFO, INVENSENSE3_PARSER_REGISTERS, invensense3_register_read(), INVENSENSE3_RUNNING, INVENSENSE3_SPI, Min, and SPITransDone.
Referenced by imu_cube_periodic(), imu_icm42688_periodic(), and imu_pixhawk6x_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Read a register based on a combined bank/regsiter value.
| inv | The invensense v3 instance |
| bank_reg | The bank is shifted 8 bits left, adn register is &0xFF |
| size | The size to read (already 1 is added for the transmission of the register to read) |
Definition at line 751 of file invensense3.c.
References foo, i2c_transceive(), INV3_READ_FLAG, invensense3_select_bank(), INVENSENSE3_SPI, and spi_submit().
Referenced by invensense3_event(), and invensense3_periodic().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Write a register based on a combined bank/regsiter value.
| inv | The invensense v3 instance |
| bank_reg | The bank is shifted 8 bits left, adn register is &0xFF |
| value | The value to write to the register |
Definition at line 715 of file invensense3.c.
References foo, i2c_transmit(), invensense3_select_bank(), INVENSENSE3_SPI, and spi_submit().
Referenced by invensense3_config(), and invensense3_reset_fifo().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Reset FIFO (can be useful in some situations)
| inv | The invensense v3 instance |
Definition at line 812 of file invensense3.c.
References BIT_SIGNAL_PATH_RESET_FIFO_FLUSH, foo, INV3REG_SIGNAL_PATH_RESET, and invensense3_register_write().
Referenced by invensense3_config().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Select the correct register bank.
| inv | The invensense v3 instance |
| bank | The bank ID to select |
Definition at line 785 of file invensense3.c.
References foo, i2c_transmit(), INV3REG_BANK_SEL, INVENSENSE3_SPI, and spi_submit().
Referenced by invensense3_register_read(), and invensense3_register_write().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 969 of file invensense3.c.
References foo, INVENSENSE3_GYRO_ODR_200HZ, INVENSENSE3_GYRO_ODR_32KHZ, and INVENSENSE3_GYRO_ODR_500HZ.
Referenced by invensense3_init().
Here is the caller graph for this function:Definition at line 72 of file invensense3.c.
Referenced by invensense3_fix_config().
Definition at line 138 of file invensense3.c.
Referenced by invensense3_fix_config().
|
static |
Definition at line 63 of file invensense3.c.
Referenced by invensense3_fix_config().
Definition at line 204 of file invensense3.c.
Referenced by invensense3_event(), invensense3_parse_fifo_data(), and invensense3_periodic().
|
static |
Definition at line 51 of file invensense3.c.
Referenced by invensense3_fix_config().