|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
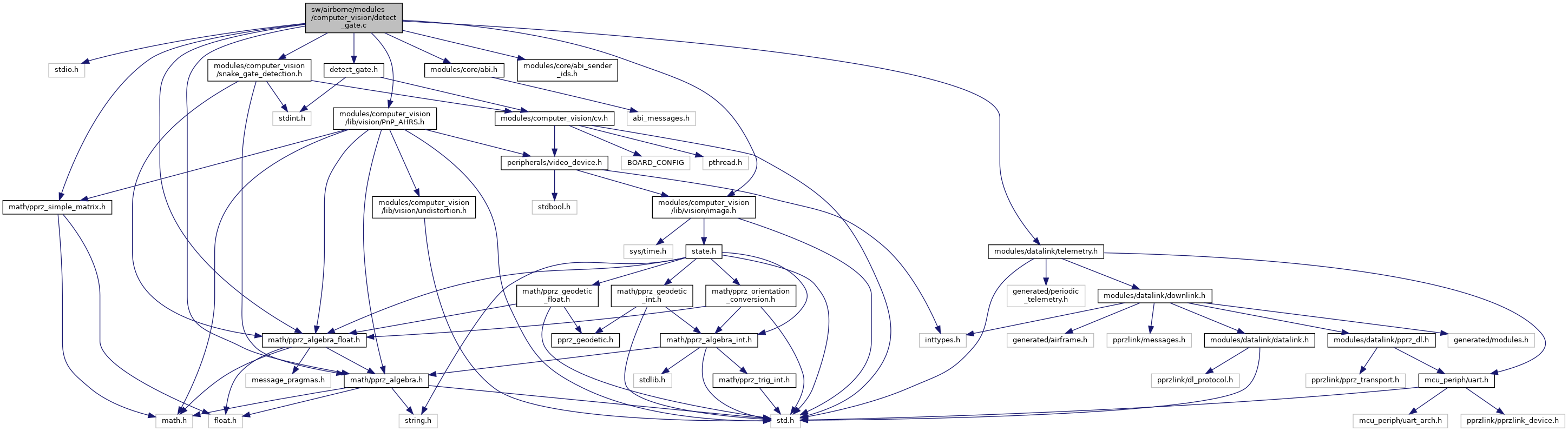
#include <stdio.h>#include "detect_gate.h"#include "modules/computer_vision/lib/vision/image.h"#include "modules/computer_vision/lib/vision/PnP_AHRS.h"#include "math/pprz_algebra.h"#include "math/pprz_algebra_float.h"#include "math/pprz_simple_matrix.h"#include "modules/core/abi.h"#include "modules/core/abi_sender_ids.h"#include "modules/computer_vision/snake_gate_detection.h"#include "modules/datalink/telemetry.h" Include dependency graph for detect_gate.c:
Include dependency graph for detect_gate.c:Go to the source code of this file.
Data Structures | |
| struct | vision_relative_position_struct |
Macros | |
| #define | DETECT_GATE_JUST_FILTER 0 |
| #define | DETECT_GATE_FPS 0 |
| Default FPS (zero means run at camera fps) | |
| #define | DETECT_GATE_CAMERA "front_camera" |
| #define | DETECT_GATE_N_SAMPLES 2000 |
| #define | DETECT_GATE_MIN_N_SIDES 3 |
| #define | DETECT_GATE_MIN_PIX_SIZE 30 |
| #define | DETECT_GATE_MIN_GATE_QUALITY 0.15 |
| #define | DETECT_GATE_GATE_THICKNESS 0.0f |
| #define | DETECT_GATE_EXCLUDE_PIXELS_TOP 0 |
| #define | DETECT_GATE_EXCLUDE_PIXELS_BOTTOM 0 |
| #define | DETECT_GATE_SIMPLIFIED_PNP 0 |
Functions | |
| static struct image_t * | detect_gate_func (struct image_t *img, uint8_t camera_id) |
| void | detect_gate_event (void) |
| static void | send_detect_gate_visual_position (struct transport_tx *trans, struct link_device *dev) |
| void | detect_gate_init (void) |
Variables | |
| int | just_filtering |
| int | n_samples |
| int | min_n_sides |
| int | min_px_size |
| float | min_gate_quality |
| float | gate_thickness |
| uint8_t | color_Ym |
| uint8_t | color_YM |
| uint8_t | color_Um |
| uint8_t | color_UM |
| uint8_t | color_Vm |
| uint8_t | color_VM |
| int | exclude_top |
| int | exclude_bottom |
| struct FloatVect3 | drone_position |
| struct gate_img | best_gate |
| struct gate_img | gates_c [MAX_GATES] |
| struct FloatVect3 | world_corners [4] |
| float | gate_size_m = 1.4 |
| float | gate_center_height = 0.0 |
| int | n_corners = 3 |
| struct FloatEulers | cam_body |
| volatile int | detect_gate_has_new_data |
| volatile float | detect_gate_x |
| volatile float | detect_gate_y |
| volatile float | detect_gate_z |
| static pthread_mutex_t | gate_detect_mutex |
| Mutex lock fo thread safety. | |
| struct vision_relative_position_struct | detectgate_vision_position = {false, 0, 0.0f, 0.0f, 0.0f} |
| struct vision_relative_position_struct |
| #define DETECT_GATE_CAMERA "front_camera" |
Definition at line 38 of file detect_gate.c.
| #define DETECT_GATE_EXCLUDE_PIXELS_BOTTOM 0 |
Definition at line 73 of file detect_gate.c.
| #define DETECT_GATE_EXCLUDE_PIXELS_TOP 0 |
Definition at line 68 of file detect_gate.c.
| #define DETECT_GATE_FPS 0 |
Default FPS (zero means run at camera fps)
Definition at line 33 of file detect_gate.c.
| #define DETECT_GATE_GATE_THICKNESS 0.0f |
Definition at line 63 of file detect_gate.c.
| #define DETECT_GATE_JUST_FILTER 0 |
Definition at line 28 of file detect_gate.c.
| #define DETECT_GATE_MIN_GATE_QUALITY 0.15 |
Definition at line 58 of file detect_gate.c.
| #define DETECT_GATE_MIN_N_SIDES 3 |
Definition at line 48 of file detect_gate.c.
| #define DETECT_GATE_MIN_PIX_SIZE 30 |
Definition at line 53 of file detect_gate.c.
| #define DETECT_GATE_N_SAMPLES 2000 |
Definition at line 43 of file detect_gate.c.
| #define DETECT_GATE_SIMPLIFIED_PNP 0 |
Definition at line 78 of file detect_gate.c.
Definition at line 264 of file detect_gate.c.
References vision_relative_position_struct::cnt, DETECT_GATE_ABI_ID, detect_gate_has_new_data, detect_gate_x, detect_gate_y, detect_gate_z, detectgate_vision_position, foo, gate_detect_mutex, vision_relative_position_struct::received, vision_relative_position_struct::x, vision_relative_position_struct::y, and vision_relative_position_struct::z.
Definition at line 134 of file detect_gate.c.
References best_gate, cam_body, color_Um, color_UM, color_Vm, color_VM, color_Ym, color_YM, DETECT_GATE_CAMERA, detect_gate_has_new_data, DETECT_GATE_SIMPLIFIED_PNP, detect_gate_x, detect_gate_y, detect_gate_z, drone_position, exclude_bottom, exclude_top, foo, gate_detect_mutex, gate_size_m, gate_thickness, gates_c, get_world_position_from_image_points(), image_yuv422_colorfilt(), just_filtering, min_gate_quality, min_n_sides, min_px_size, n_corners, n_samples, gate_img::quality, snake_gate_detection(), world_corners, FloatVect3::x, gate_img::x_corners, FloatVect3::y, gate_img::y_corners, and FloatVect3::z.
Referenced by detect_gate_init().
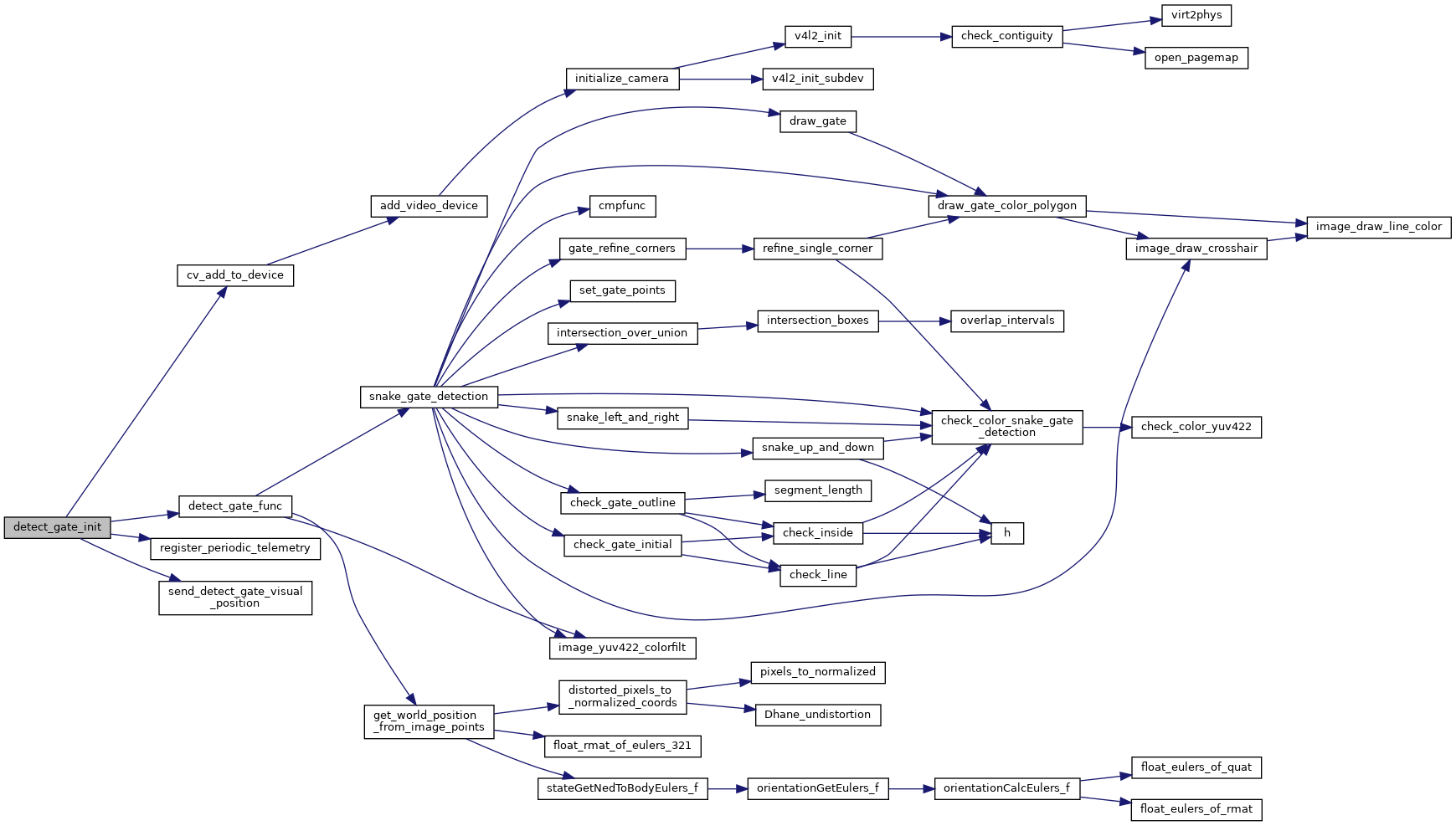
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 305 of file detect_gate.c.
References cam_body, color_Um, color_UM, color_Vm, color_VM, color_Ym, color_YM, cv_add_to_device(), DefaultPeriodic, DETECT_GATE_CAMERA, DETECT_GATE_EXCLUDE_PIXELS_BOTTOM, DETECT_GATE_EXCLUDE_PIXELS_TOP, DETECT_GATE_FPS, detect_gate_func(), DETECT_GATE_GATE_THICKNESS, detect_gate_has_new_data, DETECT_GATE_JUST_FILTER, DETECT_GATE_MIN_GATE_QUALITY, DETECT_GATE_MIN_N_SIDES, DETECT_GATE_MIN_PIX_SIZE, DETECT_GATE_N_SAMPLES, detect_gate_x, detect_gate_y, detect_gate_z, exclude_bottom, exclude_top, foo, gate_center_height, gate_detect_mutex, gate_size_m, gate_thickness, just_filtering, min_gate_quality, min_n_sides, min_px_size, n_samples, FloatEulers::phi, FloatEulers::psi, register_periodic_telemetry(), send_detect_gate_visual_position(), FloatEulers::theta, VECT3_ASSIGN, and world_corners.
Here is the call graph for this function:
|
static |
Definition at line 288 of file detect_gate.c.
References vision_relative_position_struct::cnt, detectgate_vision_position, dev, foo, vision_relative_position_struct::received, vision_relative_position_struct::x, vision_relative_position_struct::y, and vision_relative_position_struct::z.
Referenced by detect_gate_init().
Here is the caller graph for this function:| struct gate_img best_gate |
Definition at line 101 of file detect_gate.c.
Referenced by detect_gate_func(), and snake_gate_detection().
| struct FloatEulers cam_body |
Definition at line 112 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and get_world_position_from_image_points().
| uint8_t color_Um |
Definition at line 92 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| uint8_t color_UM |
Definition at line 93 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| uint8_t color_Vm |
Definition at line 94 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| uint8_t color_VM |
Definition at line 95 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| uint8_t color_Ym |
Definition at line 90 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| uint8_t color_YM |
Definition at line 91 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
Definition at line 115 of file detect_gate.c.
Referenced by detect_gate_event(), detect_gate_func(), and detect_gate_init().
Definition at line 116 of file detect_gate.c.
Referenced by detect_gate_event(), detect_gate_func(), and detect_gate_init().
Definition at line 117 of file detect_gate.c.
Referenced by detect_gate_event(), detect_gate_func(), and detect_gate_init().
Definition at line 118 of file detect_gate.c.
Referenced by detect_gate_event(), detect_gate_func(), and detect_gate_init().
| struct vision_relative_position_struct detectgate_vision_position = {false, 0, 0.0f, 0.0f, 0.0f} |
Referenced by detect_gate_event(), and send_detect_gate_visual_position().
| struct FloatVect3 drone_position |
Definition at line 100 of file detect_gate.c.
Referenced by detect_gate_func().
| int exclude_bottom |
Definition at line 97 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| int exclude_top |
Definition at line 96 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| float gate_center_height = 0.0 |
Definition at line 108 of file detect_gate.c.
Referenced by detect_gate_init().
|
static |
Mutex lock fo thread safety.
Definition at line 120 of file detect_gate.c.
Referenced by detect_gate_event(), detect_gate_func(), and detect_gate_init().
| float gate_size_m = 1.4 |
Definition at line 107 of file detect_gate.c.
Referenced by detect_gate_func(), and detect_gate_init().
| float gate_thickness |
Definition at line 89 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
Definition at line 103 of file detect_gate.c.
Referenced by detect_gate_func(), and snake_gate_detection().
| int just_filtering |
Definition at line 84 of file detect_gate.c.
Referenced by detect_gate_func(), and detect_gate_init().
| float min_gate_quality |
Definition at line 88 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| int min_n_sides |
Definition at line 86 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| int min_px_size |
Definition at line 87 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and snake_gate_detection().
| int n_corners = 3 |
Definition at line 109 of file detect_gate.c.
Referenced by detect_gate_func(), and get_world_position_from_image_points().
| int n_samples |
Definition at line 85 of file detect_gate.c.
Referenced by analyze_linear_flow_field(), calc_fast9_lukas_kanade(), check_inside(), detect_gate_func(), detect_gate_init(), fit_linear_flow_field(), fit_linear_model(), fit_linear_model_OF(), fit_linear_model_prior(), get_indices_without_replacement(), get_size_divergence(), invensense3_456_event(), invensense3_event(), RANSAC_linear_model(), and snake_gate_detection().
| struct FloatVect3 world_corners[4] |
Definition at line 106 of file detect_gate.c.
Referenced by detect_gate_func(), detect_gate_init(), and get_world_position_from_image_points().