|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Vectornav VN-200 as AHRS. More...
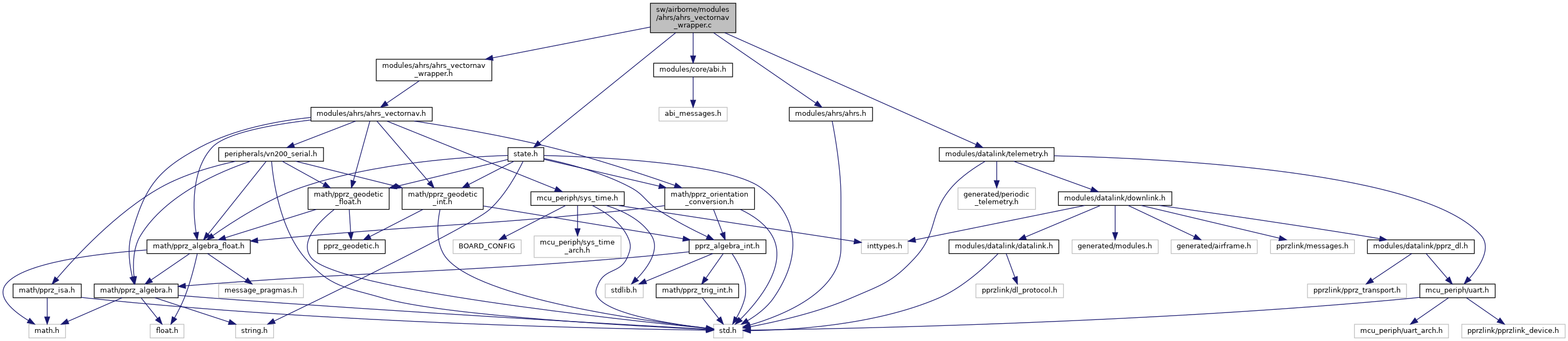
#include "modules/ahrs/ahrs_vectornav_wrapper.h"#include "modules/ahrs/ahrs.h"#include "modules/core/abi.h"#include "state.h"#include "modules/datalink/telemetry.h" Include dependency graph for ahrs_vectornav_wrapper.c:
Include dependency graph for ahrs_vectornav_wrapper.c:Go to the source code of this file.
Functions | |
| static void | send_euler (struct transport_tx *trans, struct link_device *dev) |
| void | ahrs_vectornav_wrapper_init (void) |
| void | ahrs_vectornav_wrapper_enable (uint8_t enable) |
Variables | |
| uint8_t | ahrs_vectornav_enable |
| static uint8_t | ahrs_vectornav_id = AHRS_COMP_ID_VECTORNAV |
Vectornav VN-200 as AHRS.
Definition in file ahrs_vectornav_wrapper.c.
Definition at line 65 of file ahrs_vectornav_wrapper.c.
References ahrs_vectornav_enable, foo, STATE_INPUT_ATTITUDE, STATE_INPUT_RATES, and stateSetInputFilter().
Referenced by ahrs_vectornav_wrapper_init().
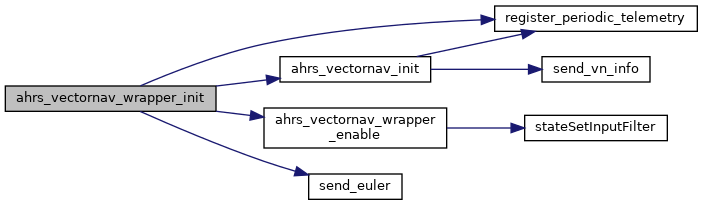
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 51 of file ahrs_vectornav_wrapper.c.
References AHRS_PRIMARY, ahrs_vectornav_init(), ahrs_vectornav_wrapper_enable(), DefaultPeriodic, foo, register_periodic_telemetry(), and send_euler().
Here is the call graph for this function:
|
static |
Definition at line 41 of file ahrs_vectornav_wrapper.c.
References ahrs_vectornav_id, ahrs_vn, VNData::attitude, dev, foo, FloatEulers::phi, FloatEulers::psi, FloatEulers::theta, and AhrsVectornav::vn_data.
Referenced by ahrs_vectornav_wrapper_init().
Here is the caller graph for this function:| uint8_t ahrs_vectornav_enable |
Definition at line 35 of file ahrs_vectornav_wrapper.c.
Referenced by ahrs_vectornav_wrapper_enable().
|
static |
Definition at line 36 of file ahrs_vectornav_wrapper.c.
Referenced by send_euler().