|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.12_stable-4-g9b43e9b
Paparazzi is a free software Unmanned Aircraft System.
|
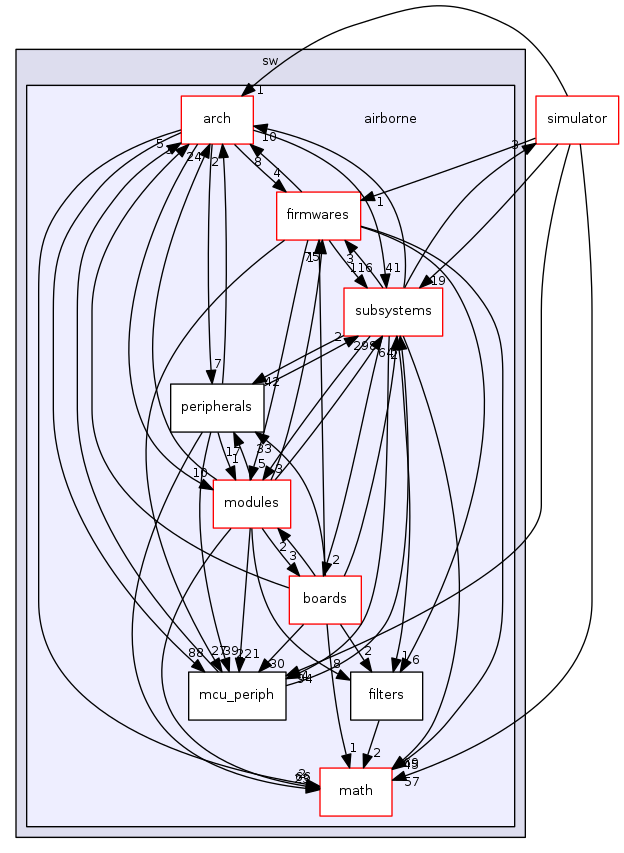
 Directory dependency graph for airborne:
Directory dependency graph for airborne:Directories | |
| directory | arch |
| directory | boards |
| directory | filters |
| directory | firmwares |
| directory | math |
| directory | mcu_periph |
| directory | modules |
| directory | peripherals |
| directory | subsystems |
Files | |
| file | autopilot.c [code] |
| Core autopilot interface common to all firmwares. | |
| file | autopilot.h [code] |
| Core autopilot interface common to all firmwares. | |
| file | inter_mcu.c [code] |
| Communication between fbw and ap processes. | |
| file | inter_mcu.h [code] |
| Communication between fbw and ap processes. | |
| file | led.h [code] |
| arch independent LED (Light Emitting Diodes) API | |
| file | link_mcu.h [code] |
| Common transport functions for the communication between FBW and AP. | |
| file | link_mcu_can.c [code] |
| file | link_mcu_can.h [code] |
| Transport for the communication between FBW and AP via CAN. | |
| file | link_mcu_spi.c [code] |
| file | link_mcu_spi.h [code] |
| Transport for the communication between FBW and AP via SPI. | |
| file | link_mcu_usart.c [code] |
| file | link_mcu_usart.h [code] |
| Transport for the communication between FBW and AP via UART. | |
| file | mcu.c [code] |
| Arch independent mcu ( Micro Controller Unit ) utilities. | |
| file | mcu.h [code] |
| Arch independent mcu ( Micro Controller Unit ) utilities. | |
| file | paparazzi.h [code] |
| file | pprz_debug.c [code] |
| file | pprz_debug.h [code] |
| file | pprz_mutex.h [code] |
| Utility functions and macros to abstract some RTOS functionalities such as mutexes. | |
| file | state.c [code] |
| General interface for the main vehicle states. | |
| file | state.h [code] |
| API to get/set the generic vehicle states. | |
 1.8.8
1.8.8