|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "uavcan.h"#include "mcu_periph/can.h"#include "modules/core/threads.h"#include "uavcan.protocol.NodeStatus.h"#include "uavcan.protocol.GetNodeInfo_req.h"#include "uavcan.protocol.GetNodeInfo_res.h"#include "mcu_periph/sys_time.h"#include "generated/airframe.h"#include "uavcan_reporting.h"#include "uavcan/uavcan_allocator.h" Include dependency graph for uavcan_reporting.c:
Include dependency graph for uavcan_reporting.c:Go to the source code of this file.
Macros | |
| #define | AC_CAN_NAME_PREFIX "org.pprz." |
Functions | |
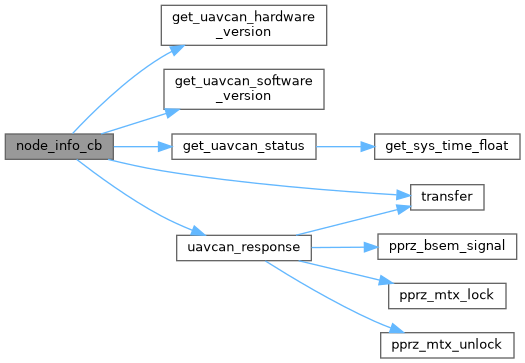
| static void | node_info_cb (struct uavcan_iface_t *iface, CanardRxTransfer *transfer) |
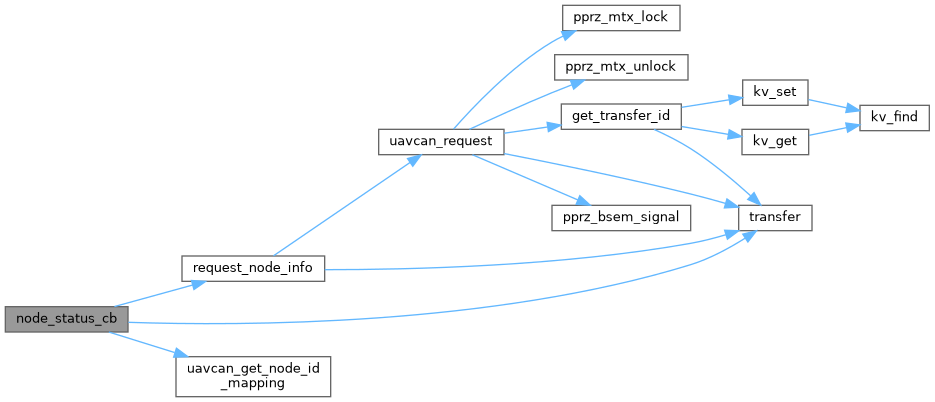
| static void | node_status_cb (struct uavcan_iface_t *iface, CanardRxTransfer *transfer) |
| request uniq_id of all nodes on the bus. | |
| static void | get_uavcan_status (struct uavcan_protocol_NodeStatus *status) |
| static void | get_uavcan_software_version (struct uavcan_protocol_SoftwareVersion *software_version) |
| static void | get_uavcan_hardware_version (struct uavcan_protocol_HardwareVersion *hardware_version) |
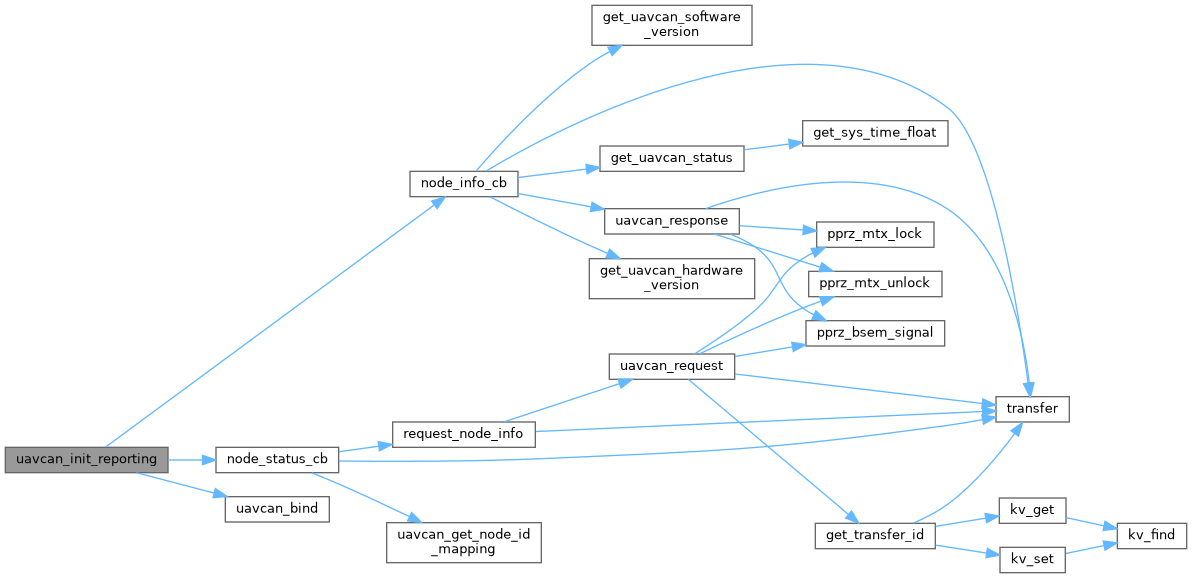
| void | uavcan_init_reporting () |
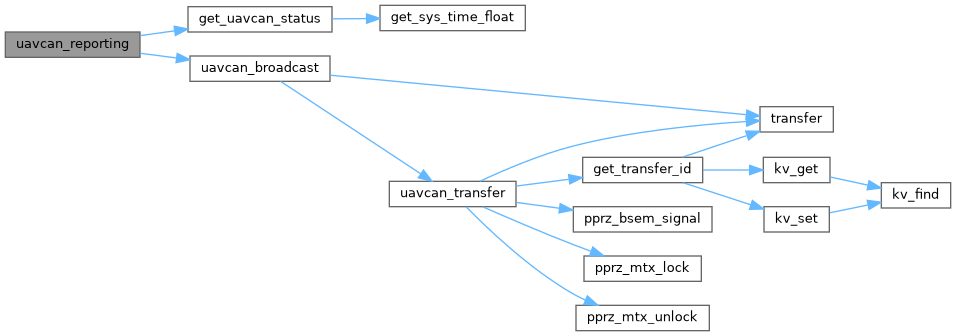
| void | uavcan_reporting (void) |
Variables | |
| static uavcan_event | node_info_ev |
| static uavcan_event | node_status_ev |
| char | ac_can_name [50] = {0} |
| uint8_t | ac_can_name_len = 0 |
| #define AC_CAN_NAME_PREFIX "org.pprz." |
Definition at line 12 of file uavcan_reporting.c.
|
static |
Definition at line 79 of file uavcan_reporting.c.
References foo.
Referenced by node_info_cb().
Here is the caller graph for this function:
|
static |
Definition at line 71 of file uavcan_reporting.c.
References foo.
Referenced by node_info_cb().
Here is the caller graph for this function:
|
static |
Definition at line 63 of file uavcan_reporting.c.
References foo, get_sys_time_float(), and status.
Referenced by node_info_cb(), and uavcan_reporting().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 88 of file uavcan_reporting.c.
References ac_can_name, ac_can_name_len, foo, get_uavcan_hardware_version(), get_uavcan_software_version(), get_uavcan_status(), Min, msg, transfer(), and uavcan_response().
Referenced by uavcan_init_reporting().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
request uniq_id of all nodes on the bus.
Since nodes must periodicaly send a NodeStatus message, its a good place to do it.
Definition at line 41 of file uavcan_reporting.c.
References request_node_info(), transfer(), and uavcan_get_node_id_mapping().
Referenced by uavcan_init_reporting().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 27 of file uavcan_reporting.c.
References ac_can_name, ac_can_name_len, AC_CAN_NAME_PREFIX, foo, Min, node_info_cb(), node_info_ev, node_status_cb(), node_status_ev, and uavcan_bind().
Referenced by uavcan_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 47 of file uavcan_reporting.c.
References foo, get_uavcan_status(), and uavcan_broadcast().
Here is the call graph for this function:| char ac_can_name[50] = {0} |
Definition at line 17 of file uavcan_reporting.c.
Referenced by node_info_cb(), and uavcan_init_reporting().
| uint8_t ac_can_name_len = 0 |
Definition at line 18 of file uavcan_reporting.c.
Referenced by node_info_cb(), and uavcan_init_reporting().
|
static |
Definition at line 14 of file uavcan_reporting.c.
Referenced by uavcan_init_reporting().
|
static |
Definition at line 15 of file uavcan_reporting.c.
Referenced by uavcan_init_reporting().