|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
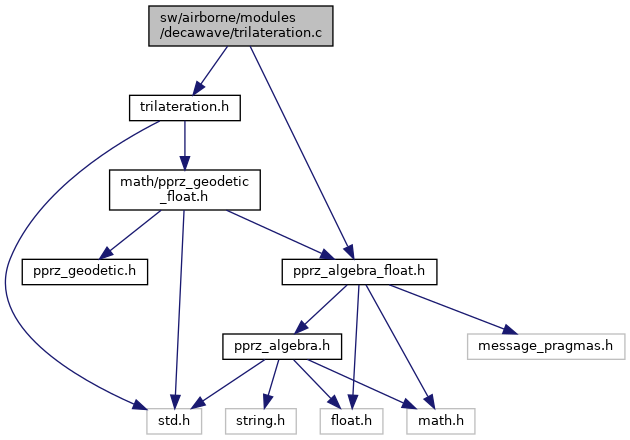
 Include dependency graph for trilateration.c:
Include dependency graph for trilateration.c:Go to the source code of this file.
Functions | |
| int | trilateration_init (struct Anchor *anchors) |
| Init internal trilateration structures. | |
| int | trilateration_compute (struct Anchor *anchors, struct EnuCoor_f *pos) |
| Compute trilateration based on the latest measurments. | |
Variables | |
| static float | P [3][3] |
| static float | Ex [3] |
| static float | Ey [3] |
| static float | Ez [3] |
| static float | D |
| static float | I |
| static float | J |
| bool | init_failed |
Definition in file trilateration.c.
Compute trilateration based on the latest measurments.
| [in] | anchors | array of anchors with updated distance measurements |
| [out] | pos | computed position |
Definition at line 87 of file trilateration.c.
References D, d2, Anchor::distance, Ex, Ey, Ez, foo, I, init_failed, J, P, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Referenced by check_and_compute_data().
Here is the caller graph for this function:Init internal trilateration structures.
| [in] | anchors | array of anchors with their location |
Definition at line 39 of file trilateration.c.
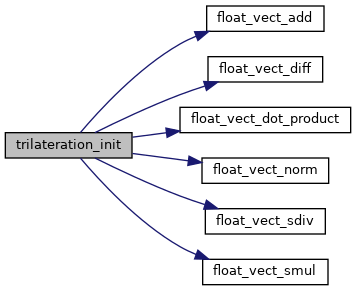
References D, Ex, Ey, Ez, float_vect_add(), float_vect_diff(), float_vect_dot_product(), float_vect_norm(), float_vect_sdiv(), float_vect_smul(), foo, init_failed, J, P, Anchor::pos, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Referenced by uwb_positioning_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 35 of file trilateration.c.
Referenced by calculate_edge_displacement(), fit_linear_model(), fit_linear_model_OF(), fit_linear_model_prior(), get_entropy(), PID_divergence_control(), predict_value(), RANSAC_linear_model(), recursive_least_squares_batch(), trilateration_compute(), and trilateration_init().
|
static |
Definition at line 33 of file trilateration.c.
Referenced by error_output(), trilateration_compute(), and trilateration_init().
|
static |
Definition at line 33 of file trilateration.c.
Referenced by trilateration_compute(), and trilateration_init().
|
static |
Definition at line 33 of file trilateration.c.
Referenced by trilateration_compute(), and trilateration_init().
Definition at line 35 of file trilateration.c.
Referenced by trilateration_compute().
| bool init_failed |
Definition at line 37 of file trilateration.c.
Referenced by trilateration_compute(), and trilateration_init().
|
static |
Definition at line 35 of file trilateration.c.
Referenced by gvf_parametric_control_2D(), kalmanEstimation(), trilateration_compute(), and trilateration_init().
|
static |
Definition at line 31 of file trilateration.c.
Referenced by calc_model(), distance_to_segment(), distance_to_wall(), ins_flow_update(), lla_of_ecef_d(), lla_of_ecef_f(), nav_line_osam_run(), PID_divergence_control(), recursive_least_squares(), sum_EFF_MAT_RW(), trilateration_compute(), trilateration_init(), update_alt_conf(), update_biased_z_conf(), update_obs_height(), and update_vz_conf().