|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Collision avoidance library. More...
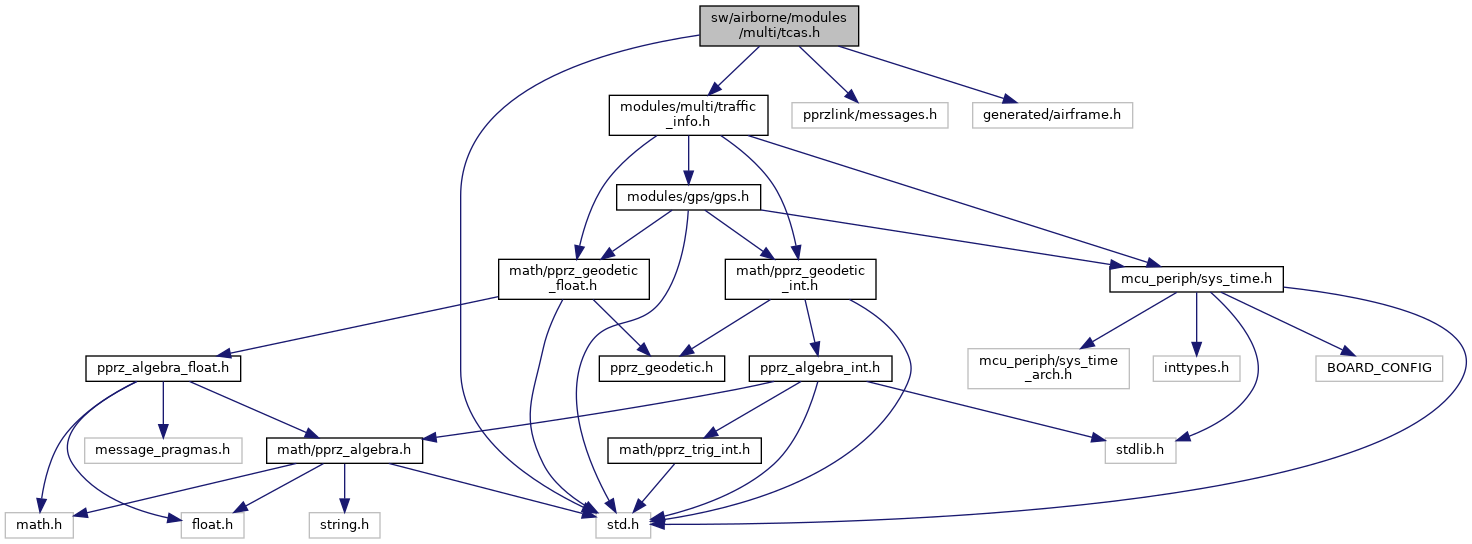
#include "std.h"#include "pprzlink/messages.h"#include "generated/airframe.h"#include "modules/multi/traffic_info.h" Include dependency graph for tcas.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for tcas.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | tcas_ac_status |
Macros | |
| #define | TCAS_NO_ALARM 0 |
| #define | TCAS_TA 1 |
| #define | TCAS_RA 2 |
Enumerations | |
| enum | tcas_resolve { RA_NONE , RA_LEVEL , RA_CLIMB , RA_DESCEND } |
Functions | |
| void | tcas_init (void) |
| void | tcas_periodic_task_1Hz (void) |
| void | tcas_periodic_task_4Hz (void) |
| void | callTCAS (void) |
| void | parseTcasResolve (uint8_t *buf) |
| void | parseTcasRA (uint8_t *buf) |
Collision avoidance library.
Definition in file tcas.h.
| struct tcas_ac_status |
| Data Fields | ||
|---|---|---|
| enum tcas_resolve | resolve | |
| uint8_t | status | |
Definition at line 65 of file tcas.c.
References tcas_alt_setpoint, TCAS_RA, tcas_status, and v_ctl_altitude_setpoint.
Referenced by navigation_task().
Here is the caller graph for this function:Definition at line 95 of file tcas.c.
References dl_buffer, foo, tcas_ac_status::resolve, tcas_acs_status, and ti_acs_id.
Definition at line 87 of file tcas.c.
References foo, tcas_ac_status::resolve, tcas_acs_status, and ti_acs_id.
Definition at line 70 of file tcas.c.
References foo, ground_alt, NB_ACS, RA_NONE, tcas_ac_status::resolve, tcas_ac_status::status, tcas_ac_RA, tcas_acs_status, tcas_alim, TCAS_ALIM, tcas_alt_setpoint, tcas_dmod, TCAS_DMOD, TCAS_NO_ALARM, tcas_status, tcas_tau_ra, TCAS_TAU_RA, tcas_tau_ta, and TCAS_TAU_TA.
Definition at line 117 of file tcas.c.
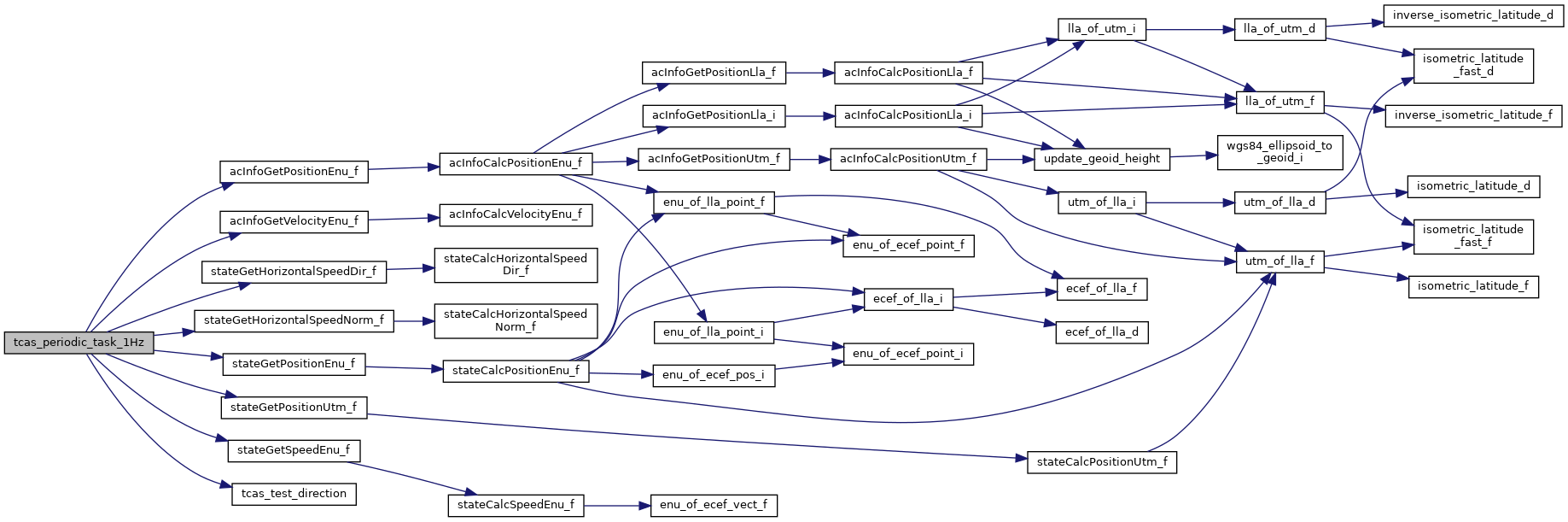
References acInfo::ac_id, acInfoGetPositionEnu_f(), acInfoGetVelocityEnu_f(), DefaultChannel, DefaultDevice, foo, gps, ground_alt, acInfo::itow, NB_ACS, RA_CLIMB, RA_DESCEND, RA_LEVEL, RA_NONE, tcas_ac_status::resolve, stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), stateGetPositionEnu_f(), stateGetPositionUtm_f(), stateGetSpeedEnu_f(), tcas_ac_status::status, status, tcas_ac_RA, tcas_acs_status, TCAS_DT_MAX, TCAS_HUGE_TAU, TCAS_IsInside, TCAS_NO_ALARM, TCAS_RA, tcas_resolve, tcas_status, TCAS_TA, tcas_tau_ra, tcas_tau_ta, tcas_test_direction(), ti_acs, ti_acs_id, GpsState::tow, EnuCoor_f::x, EnuCoor_f::y, and EnuCoor_f::z.
Here is the call graph for this function:Definition at line 236 of file tcas.c.
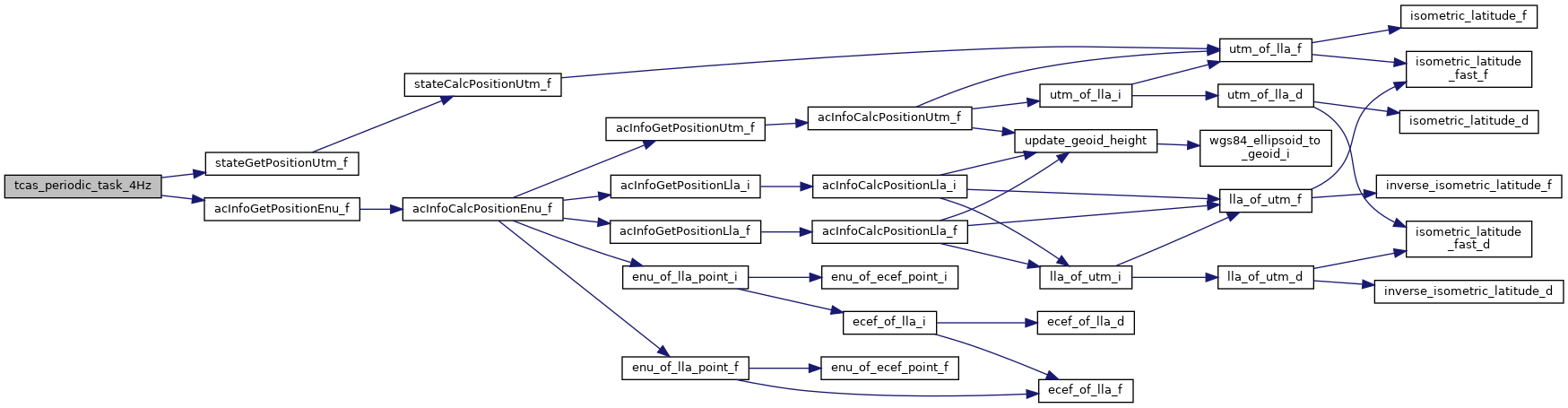
References acInfoGetPositionEnu_f(), foo, ground_alt, Min, nav_altitude, RA_CLIMB, RA_DESCEND, RA_LEVEL, RA_NONE, stateGetPositionUtm_f(), tcas_ac_RA, tcas_alim, tcas_alt_setpoint, TCAS_RA, and tcas_status.
Here is the call graph for this function:
|
extern |
Definition at line 40 of file tcas.c.
Referenced by tcas_init(), tcas_periodic_task_1Hz(), and tcas_periodic_task_4Hz().
|
extern |
Definition at line 41 of file tcas.c.
Referenced by parseTcasRA(), parseTcasResolve(), tcas_init(), and tcas_periodic_task_1Hz().
|
extern |
Definition at line 35 of file tcas.c.
Referenced by callTCAS(), tcas_init(), and tcas_periodic_task_4Hz().
|
extern |
Definition at line 39 of file tcas.c.
Referenced by tcas_periodic_task_1Hz().
|
extern |
Definition at line 38 of file tcas.c.
Referenced by callTCAS(), tcas_init(), tcas_periodic_task_1Hz(), and tcas_periodic_task_4Hz().
|
extern |
Definition at line 36 of file tcas.c.
Referenced by tcas_init(), and tcas_periodic_task_1Hz().