|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
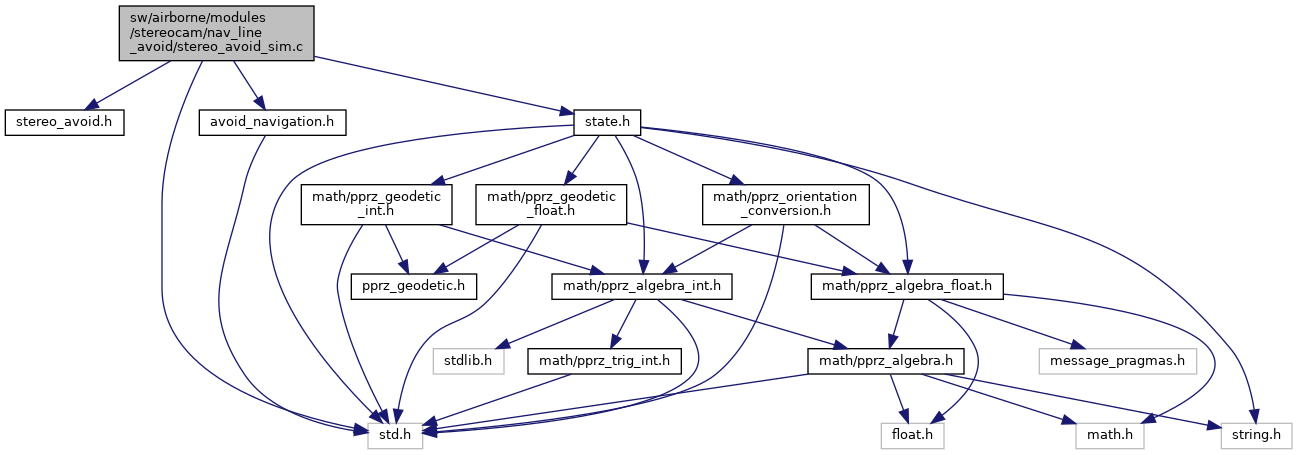
 Include dependency graph for stereo_avoid_sim.c:
Include dependency graph for stereo_avoid_sim.c:Go to the source code of this file.
Macros | |
| #define | NormAngleRad(x) |
| Normalize a degree angle between 0 and 359. | |
Functions | |
| void | stereo_avoid_init (void) |
| void | stereo_avoid_run (void) |
| void | stereo_avoid_start (void) |
| void | stereo_avoid_stop (void) |
| #define NormAngleRad | ( | x | ) |
Normalize a degree angle between 0 and 359.
Definition at line 46 of file stereo_avoid_sim.c.
Definition at line 35 of file stereo_avoid_sim.c.
References avoid_navigation_data, init_avoid_navigation(), and AvoidNavigationStruct::stereo_bin.
Here is the call graph for this function:Definition at line 53 of file stereo_avoid_sim.c.
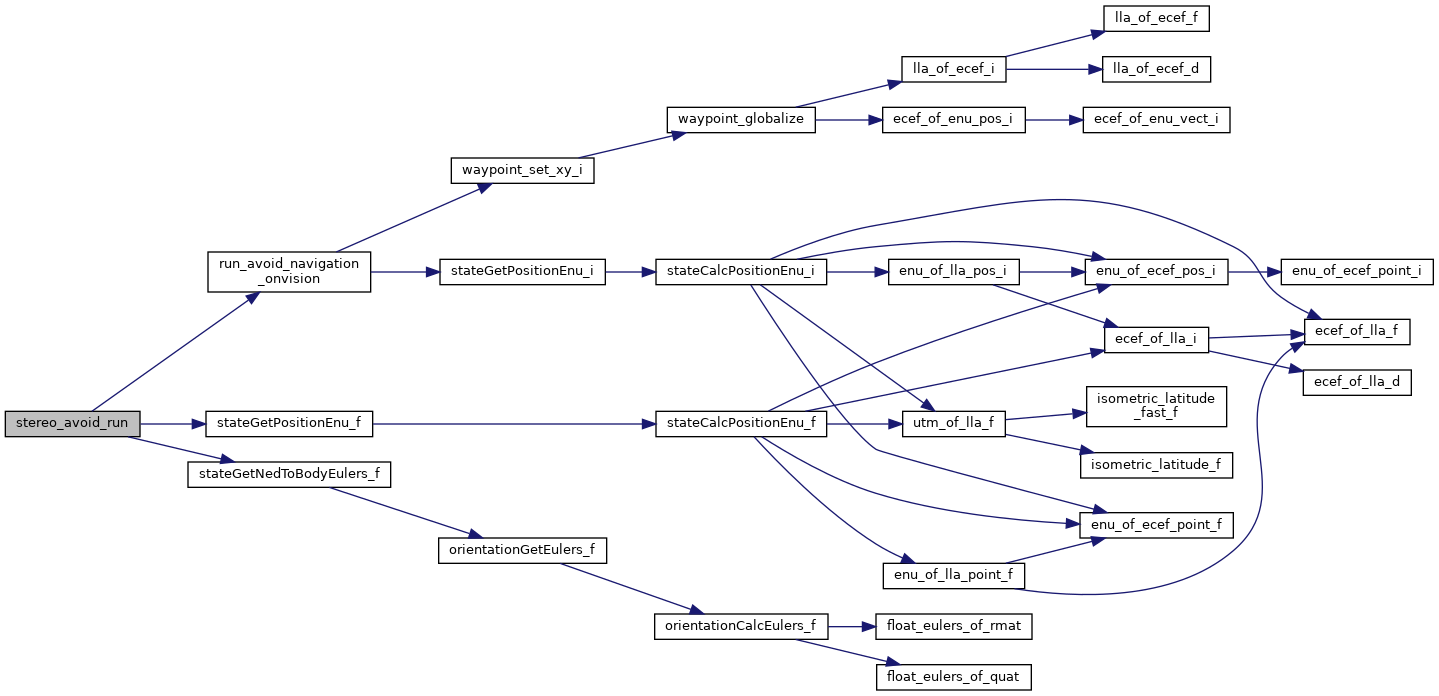
References avoid_navigation_data, counter, foo, heading, NormAngleRad, FloatEulers::psi, run_avoid_navigation_onvision(), stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), and AvoidNavigationStruct::stereo_bin.
Here is the call graph for this function:Definition at line 112 of file stereo_avoid_sim.c.
Definition at line 117 of file stereo_avoid_sim.c.