|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Driver for an sonar rangfinder sensor when used via an ADC channel. More...
#include "std.h" Include dependency graph for sonar_adc.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for sonar_adc.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | SonarADC |
Functions | |
| void | sonar_adc_init (void) |
| void | sonar_adc_periodic (void) |
| Reading Read ADC value to update sonar measurement. | |
| void | sonar_adc_report (void) |
| Debug report Option to send debug informative values over telemetry. | |
Variables | |
| struct SonarADC | sonar_adc |
Driver for an sonar rangfinder sensor when used via an ADC channel.
Driver module for an analog rangefinder sensor connected to an ADC channel.
This module reads the ADC values from a rangefinder sensor and converts those values to a distance in meters or fractions thereof.
Options include:
Definition in file sonar_adc.h.
| struct SonarADC |
Definition at line 121 of file sonar_adc.c.
References adc_buf_channel(), DEFAULT_AV_NB_SAMPLE, DefaultPeriodic, SonarADC::distance, foo, init_butterworth_2_low_pass(), SonarADC::raw, register_periodic_telemetry(), SonarADC::scale, sonar_adc, sonar_adc_buf, SONAR_ADC_LOWPASS_TAU, SONAR_ADC_SCALE, sonar_adc_send_sonar(), sonar_filt, SonarADC::update_agl, and USE_SONAR_ADC_AGL.
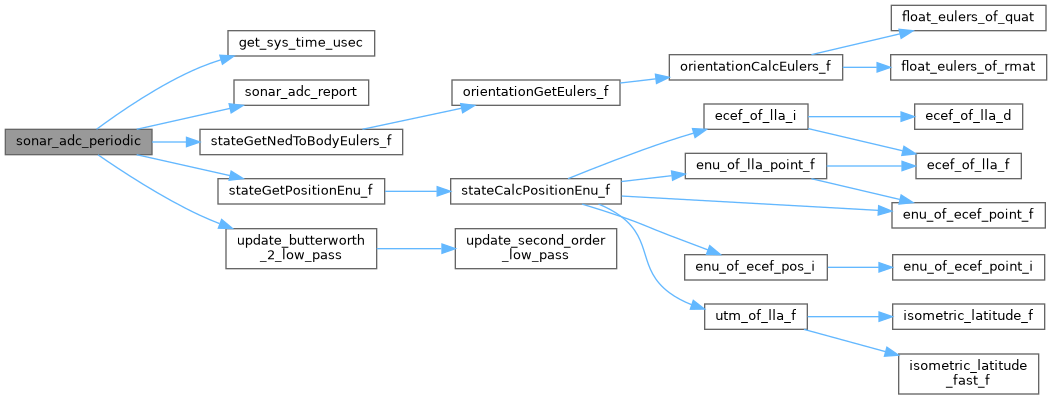
Here is the call graph for this function:Reading Read ADC value to update sonar measurement.
Definition at line 145 of file sonar_adc.c.
References AGL_SONAR_ADC_ID, adc_buf::av_nb_sample, SonarADC::distance, foo, get_sys_time_usec(), FloatEulers::phi, SonarADC::raw, SonarADC::scale, sonar_adc, sonar_adc_buf, SONAR_ADC_MAX_RANGE, SONAR_ADC_MIN_RANGE, SONAR_ADC_OFFSET, SONAR_ADC_RAW_OFFSET, sonar_adc_report(), sonar_filt, stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), adc_buf::sum, FloatEulers::theta, SonarADC::update_agl, update_butterworth_2_low_pass(), and EnuCoor_f::z.
Here is the call graph for this function:Debug report Option to send debug informative values over telemetry.
Definition at line 207 of file sonar_adc.c.
References DefaultChannel, DefaultDevice, SonarADC::distance, foo, SonarADC::raw, and sonar_adc.
Referenced by sonar_adc_periodic().
Here is the caller graph for this function:
|
extern |
Definition at line 107 of file sonar_adc.c.
Referenced by sonar_adc_init(), sonar_adc_periodic(), sonar_adc_report(), sonar_adc_send_sonar(), and sonar_pwm_read().