|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
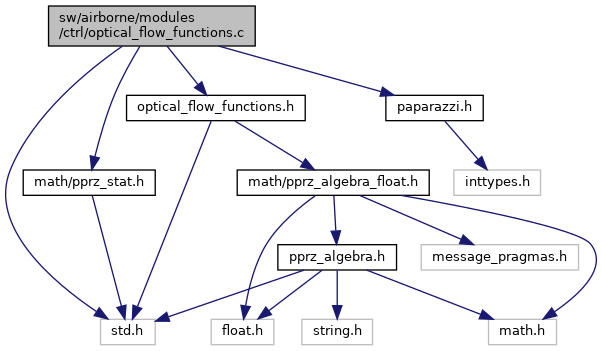
#include "optical_flow_functions.h"#include "paparazzi.h"#include "math/pprz_stat.h"#include "std.h" Include dependency graph for optical_flow_functions.c:
Include dependency graph for optical_flow_functions.c:Go to the source code of this file.
Macros | |
| #define | OFH_MAXBANK 10.f |
| #define | OF_LP_CONST 0.5 |
| #define | OF_COV_DELAY_STEPS COV_WINDOW_SIZE/2 |
Functions | |
| float | set_cov_div (bool cov_method, struct OFhistory *history, struct DesiredInputs *inputs) |
| Set the covariance of the divergence and the thrust / past divergence This funciton should only be called once per time step. | |
| void | set_cov_flow (bool cov_method, struct OFhistory *historyX, struct OFhistory *historyY, struct DesiredInputs *inputs, struct FloatVect3 *covs) |
| Set the covariance of the flow and past flow / desired angle This funciton should only be called once per time step. | |
| float | PID_flow_control (float dt, struct OpticalFlowHoverControl *of_hover_ctrl) |
| Determine and set the desired angle for constant flow control. | |
| int32_t | PID_divergence_control (float dt, struct OpticalFlowHoverControl *of_hover_ctrl) |
| Determine and set the thrust for constant divergence control. | |
Variables | |
| uint32_t | ind_histXY |
| uint8_t | cov_array_filledXY |
| uint32_t | ind_histZ |
| uint8_t | cov_array_filledZ |
| struct OpticalFlowHover | of_hover |
| #define OF_COV_DELAY_STEPS COV_WINDOW_SIZE/2 |
Definition at line 38 of file optical_flow_functions.c.
| #define OF_LP_CONST 0.5 |
Definition at line 33 of file optical_flow_functions.c.
Definition at line 28 of file optical_flow_functions.c.
| int32_t PID_divergence_control | ( | float | dt, |
| struct OpticalFlowHoverControl * | of_hover_ctrl | ||
| ) |
Determine and set the thrust for constant divergence control.
| [out] | thrust | |
| [in] | dt | time difference since last update |
| [in] | *of_hover_ctrl | OpticalFlowHoverControl structure |
Definition at line 161 of file optical_flow_functions.c.
References foo, lp_factor, MAX_PPRZ, and OF_LP_CONST.
Referenced by vertical_ctrl_module_run().
Here is the caller graph for this function:| float PID_flow_control | ( | float | dt, |
| struct OpticalFlowHoverControl * | of_hover_ctrl | ||
| ) |
Determine and set the desired angle for constant flow control.
| [out] | desired | angle |
| [in] | dt | time difference since last update |
| [in] | *of_hover_ctrl | OpticalFlowHoverControl structure |
Definition at line 133 of file optical_flow_functions.c.
References foo, lp_factor, OF_LP_CONST, and OFH_MAXBANK.
Referenced by horizontal_ctrl_module_run().
Here is the caller graph for this function:| float set_cov_div | ( | bool | cov_method, |
| struct OFhistory * | history, | ||
| struct DesiredInputs * | inputs | ||
| ) |
Set the covariance of the divergence and the thrust / past divergence This funciton should only be called once per time step.
| [in] | thrust | the current thrust value |
Definition at line 53 of file optical_flow_functions.c.
References cov_array_filledZ, cov_div, cov_method, COV_WINDOW_SIZE, covariance_f(), OpticalFlowHover::divergence, foo, ind_histZ, MAX_PPRZ, normalized_thrust, OF_COV_DELAY_STEPS, of_hover, and DesiredInputs::thrust.
Referenced by vertical_ctrl_module_run().
Here is the call graph for this function: Here is the caller graph for this function:| void set_cov_flow | ( | bool | cov_method, |
| struct OFhistory * | historyX, | ||
| struct OFhistory * | historyY, | ||
| struct DesiredInputs * | inputs, | ||
| struct FloatVect3 * | covs | ||
| ) |
Set the covariance of the flow and past flow / desired angle This funciton should only be called once per time step.
Definition at line 90 of file optical_flow_functions.c.
References cov_array_filledXY, cov_method, COV_WINDOW_SIZE, covariance_f(), OpticalFlowHover::flowX, OpticalFlowHover::flowY, foo, historyX, historyY, ind_histXY, OFhistory::input, OFhistory::OF, OF_COV_DELAY_STEPS, of_hover, OFH_MAXBANK, OFhistory::past_OF, DesiredInputs::phi, and DesiredInputs::theta.
Referenced by horizontal_ctrl_module_run().
Here is the call graph for this function: Here is the caller graph for this function:| uint8_t cov_array_filledXY |
Definition at line 42 of file optical_flow_functions.c.
Referenced by reset_horizontal_vars(), and set_cov_flow().
| uint8_t cov_array_filledZ |
Definition at line 44 of file optical_flow_functions.c.
Referenced by reset_vertical_vars(), and set_cov_div().
| uint32_t ind_histXY |
Definition at line 41 of file optical_flow_functions.c.
Referenced by reset_horizontal_vars(), and set_cov_flow().
| uint32_t ind_histZ |
Definition at line 43 of file optical_flow_functions.c.
Referenced by reset_vertical_vars(), and set_cov_div().
| struct OpticalFlowHover of_hover |
Definition at line 46 of file optical_flow_functions.c.
Referenced by horizontal_ctrl_module_run(), reset_horizontal_vars(), reset_vertical_vars(), send_optical_flow_hover(), set_cov_div(), set_cov_flow(), and vertical_ctrl_module_run().