|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
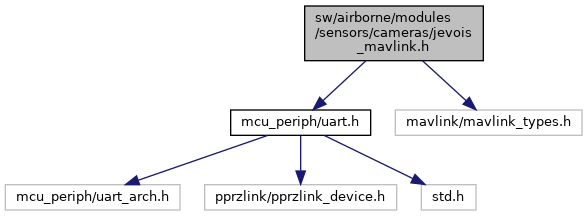
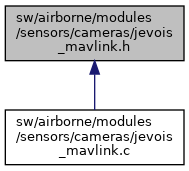
 Include dependency graph for jevois_mavlink.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for jevois_mavlink.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | JEVOIS_DEV uart2 |
| #define | MAVLinkDev (&(JEVOIS_DEV).device) |
| #define | MAVLinkTransmit(c) MAVLinkDev->put_byte(MAVLinkDev->periph, 0, c) |
| #define | MAVLinkChAvailable() MAVLinkDev->char_available(MAVLinkDev->periph) |
| #define | MAVLinkGetch() MAVLinkDev->get_byte(MAVLinkDev->periph) |
| #define | MAVLinkSendMessage() MAVLinkDev->send_message(MAVLinkDev->periph, 0) |
| #define | MAVLINK_USE_CONVENIENCE_FUNCTIONS |
| #define | MAVLINK_ALIGNED_FIELDS 0 |
Variables | |
| mavlink_system_t | mavlink_system |
Definition in file jevois_mavlink.h.
Definition at line 39 of file jevois_mavlink.h.
| #define MAVLINK_ALIGNED_FIELDS 0 |
Definition at line 59 of file jevois_mavlink.h.
| #define MAVLINK_USE_CONVENIENCE_FUNCTIONS |
Definition at line 58 of file jevois_mavlink.h.
| #define MAVLinkChAvailable | ( | ) | MAVLinkDev->char_available(MAVLinkDev->periph) |
Definition at line 44 of file jevois_mavlink.h.
| #define MAVLinkDev (&(JEVOIS_DEV).device) |
Definition at line 42 of file jevois_mavlink.h.
| #define MAVLinkGetch | ( | ) | MAVLinkDev->get_byte(MAVLinkDev->periph) |
Definition at line 45 of file jevois_mavlink.h.
| #define MAVLinkSendMessage | ( | ) | MAVLinkDev->send_message(MAVLinkDev->periph, 0) |
Definition at line 46 of file jevois_mavlink.h.
| #define MAVLinkTransmit | ( | c | ) | MAVLinkDev->put_byte(MAVLinkDev->periph, 0, c) |
Definition at line 43 of file jevois_mavlink.h.
|
inlinestatic |
Definition at line 63 of file jevois_mavlink.h.
References foo, and MAVLinkTransmit.
Definition at line 182 of file jevois_mavlink.c.
References vision_relative_position_struct::cnt, visual_target_struct::count, DEBUG_PRINT, foo, visual_target_struct::h, heartbeat, JEVOIS_MAVLINK_ABI_ID, jevois_vision_position, jevois_visual_target, MAVLinkChAvailable, MAVLinkGetch, msg, visual_target_struct::quality, vision_relative_position_struct::received, visual_target_struct::received, visual_target_struct::source, status, visual_target_struct::w, vision_relative_position_struct::x, visual_target_struct::x, vision_relative_position_struct::y, visual_target_struct::y, and vision_relative_position_struct::z.
Definition at line 99 of file jevois_mavlink.c.
References ax_filtered, ay_filtered, az_filtered, imu, and update_butterworth_2_low_pass_int().
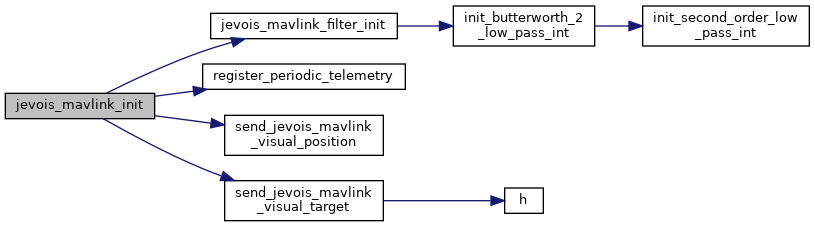
Here is the call graph for this function:Definition at line 154 of file jevois_mavlink.c.
References DefaultPeriodic, foo, jevois_mavlink_filter_init(), MAVLINK_SYSID, mavlink_system, register_periodic_telemetry(), send_jevois_mavlink_visual_position(), and send_jevois_mavlink_visual_target().
Here is the call graph for this function:Definition at line 168 of file jevois_mavlink.c.
References foo, mavlink_send_attitude(), mavlink_send_heartbeat(), mavlink_send_highres_imu(), and mavlink_send_set_mode().
Here is the call graph for this function:
|
extern |
Definition at line 72 of file mavlink.c.
Referenced by jevois_mavlink_init(), mavlink_block_message_handler(), mavlink_init(), and mavlink_wp_message_handler().