|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
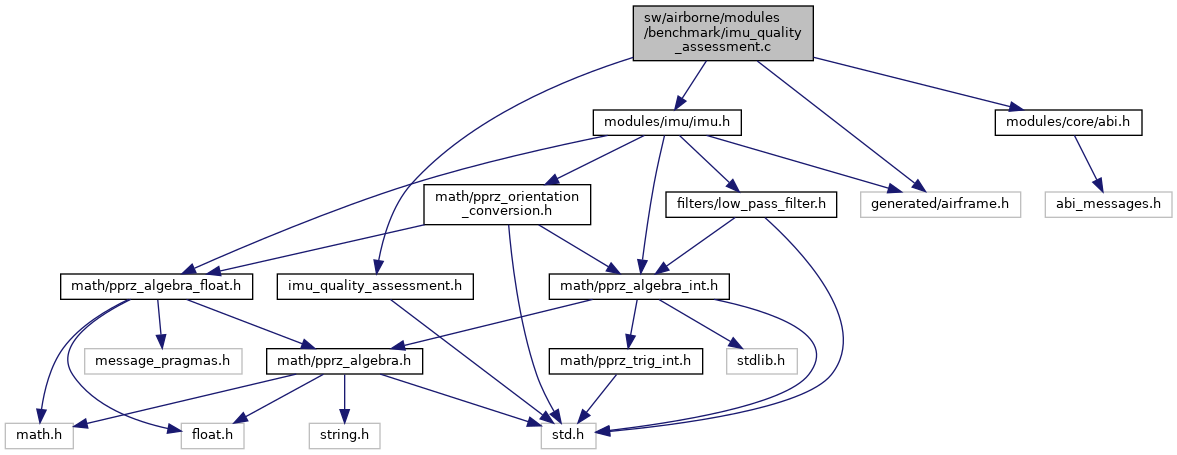
#include "imu_quality_assessment.h"#include "modules/core/abi.h"#include "modules/imu/imu.h"#include "generated/airframe.h" Include dependency graph for imu_quality_assessment.c:
Include dependency graph for imu_quality_assessment.c:Go to the source code of this file.
Macros | |
| #define | IMU_QUALITY_ASSESSMENT_FILTER_ORDER 2 |
| #define | PEAK_TRACKER(_Value, _Peak) |
Functions | |
| void | imu_quality_assessment_init (void) |
| void | imu_quality_assessment_periodic (void) |
Variables | |
| struct imu_quality_assessment_data_struct | imu_quality_assessment_data |
| #define IMU_QUALITY_ASSESSMENT_FILTER_ORDER 2 |
Definition at line 36 of file imu_quality_assessment.c.
Definition at line 32 of file imu_quality_assessment.c.
Definition at line 47 of file imu_quality_assessment.c.
References A, ABI_BROADCAST, B, foo, imu_get_accel(), imu_quality_assessment_data, IMU_QUALITY_ASSESSMENT_FILTER_ORDER, imu_accel_t::neutral, PEAK_TRACKER, imu_quality_assessment_data_struct::q, imu_quality_assessment_data_struct::q_ax, imu_quality_assessment_data_struct::q_ay, imu_quality_assessment_data_struct::q_az, imu_accel_t::scale, imu_accel_t::scaled, imu_accel_t::unscaled, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
Here is the call graph for this function:| struct imu_quality_assessment_data_struct imu_quality_assessment_data |
Definition at line 29 of file imu_quality_assessment.c.
Referenced by imu_quality_assessment_periodic().